

A Soft Body Skeleton Structure with Variable Stiffness and Soft Arm Robot
A technology of soft skeleton and variable stiffness, which is applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as insufficient stiffness, achieve fast and efficient stiffness, and improve adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The technical solutions of the present invention will be further specifically described below through specific embodiments and in conjunction with the accompanying drawings.
[0033] In the present invention, unless otherwise specified, all equipment and raw materials can be purchased from the market or commonly used in this industry. The methods in the following examples, unless otherwise specified, are conventional methods in this field.
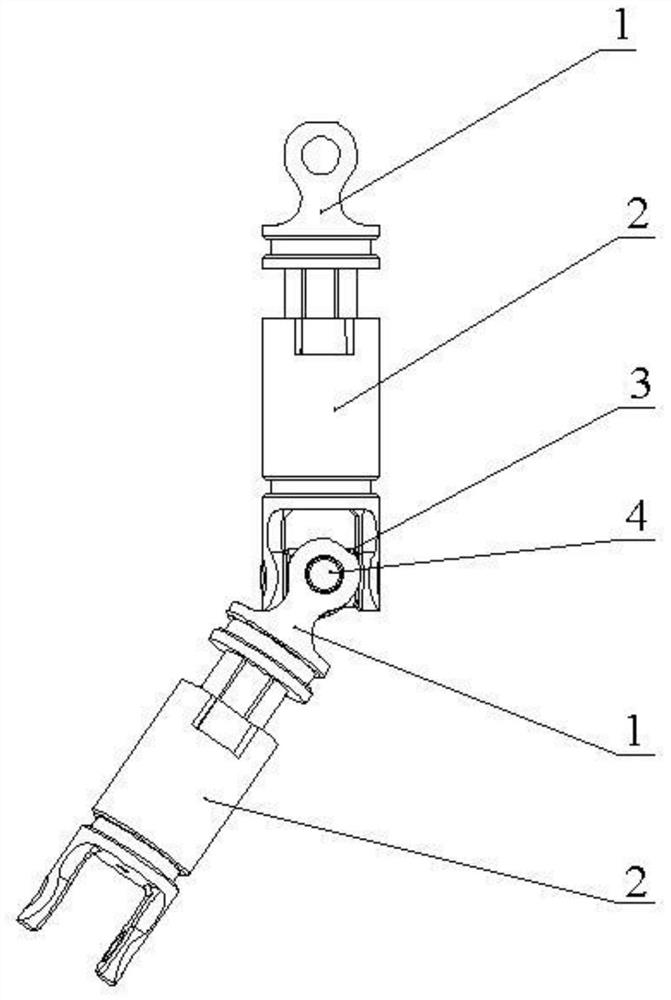
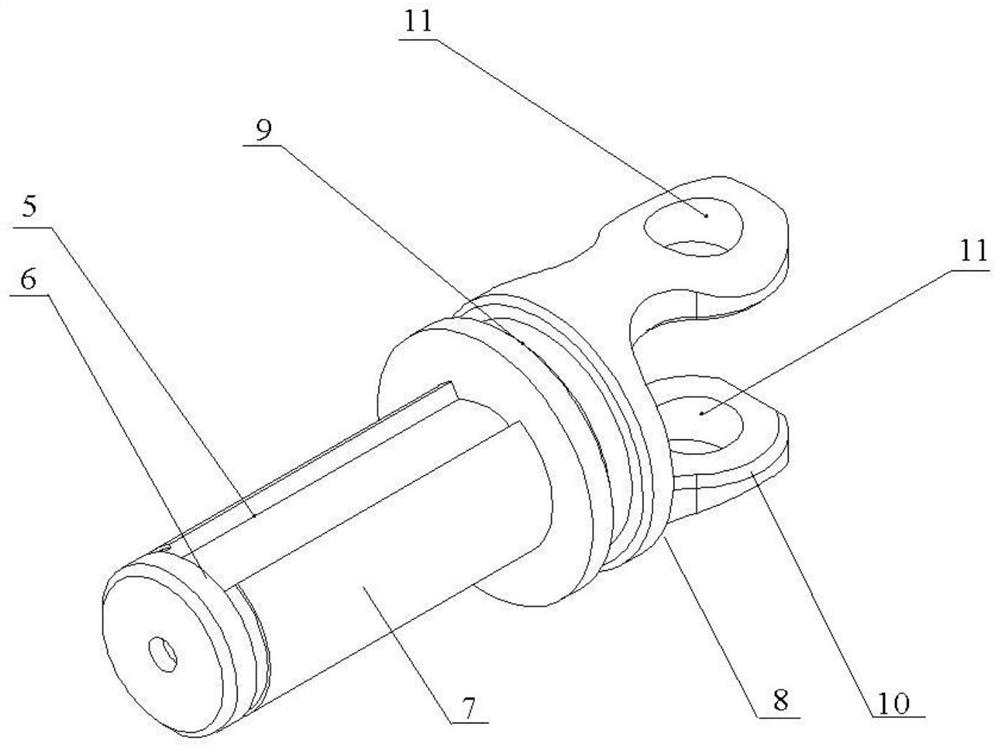
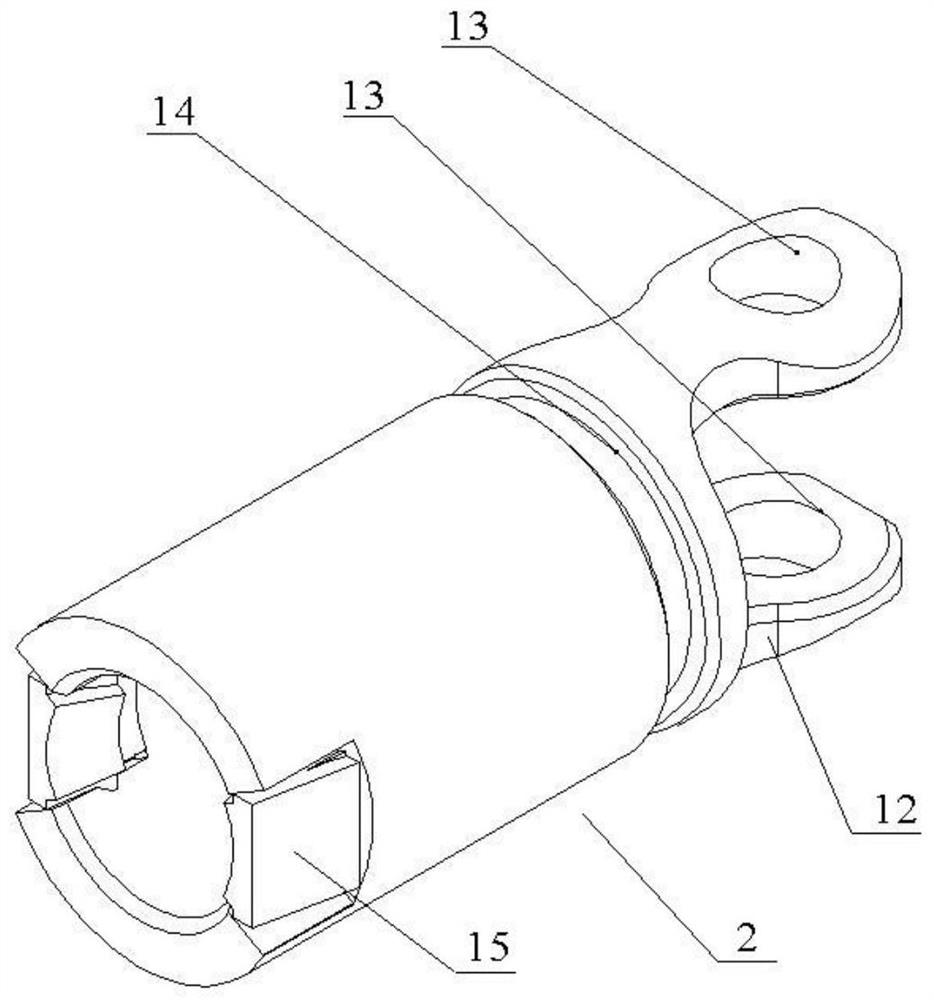
[0034] Such as figure 1 and Figure 7 As shown, a variable stiffness soft body skeleton structure includes several stretchable units, and two adjacent stretchable units are coaxially connected to a universal joint connector; the space between the stretchable unit and the universal joint The cavity is filled with particle obstructions 20, and the outer surface of the skeleton structure formed by the telescopic unit is covered with a vacuum-sealed bag 19, and a vacuum air pump is provided on the vacuum-sealed bag. The material of th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More