

Quadrotor unmanned aerial vehicle cluster anti-interference formation control method based on disturbance observer
A technology of four-rotor UAV and disturbance observer, which is applied in non-electric variable control, control/regulation system, three-dimensional position/course control, etc., can solve the problem of limitations, poor accuracy and rapidity, and relatively high accuracy requirements for cluster formation control. advanced questions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0080] The technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only part of the embodiments of the present invention, not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
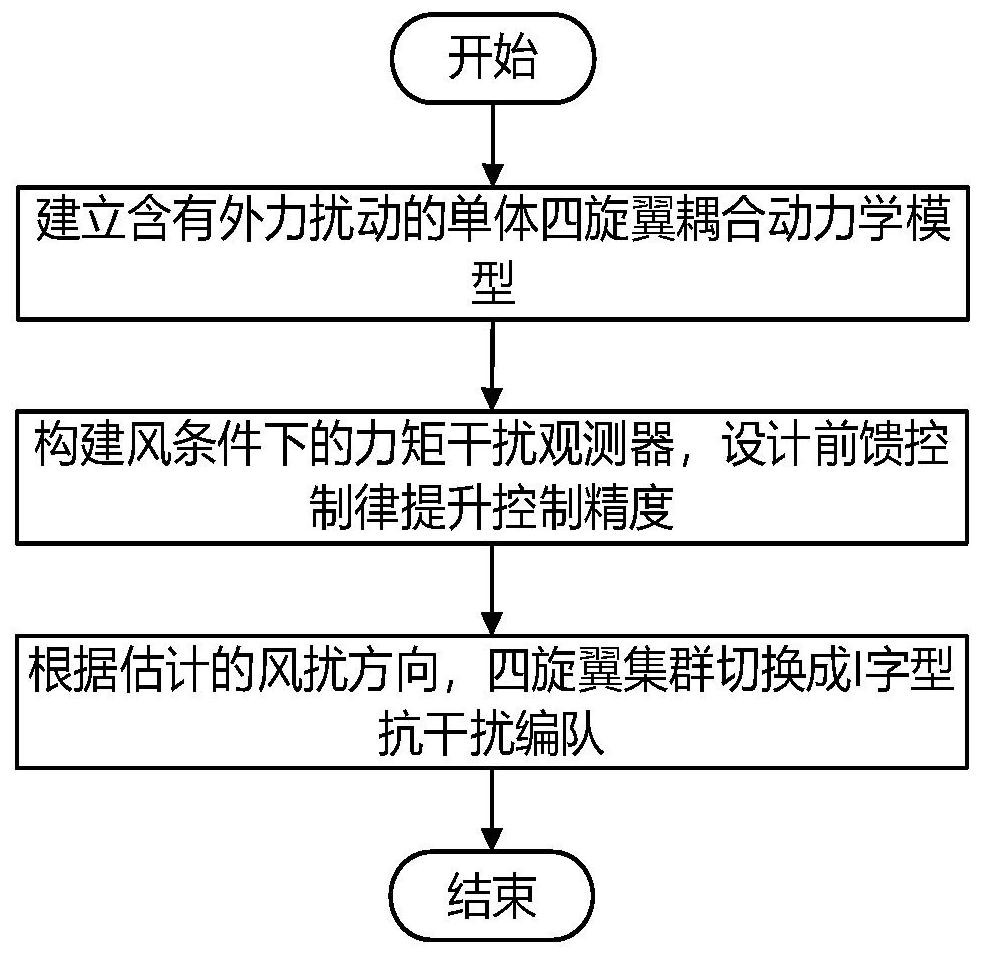
[0081] Such as figure 1 As shown, the present invention proposes a quadrotor unmanned aerial vehicle cluster anti-jamming formation control method based on a jamming observer, comprising the following steps:
[0082] Step 1: Construct a single quadrotor coupling dynamics model with external force disturbance;
[0083] Step 2, establishing a disturbance observer for the moment disturbance generated by the external wind generated by the UAV; then, a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More