Optimal robust control method for transition flight mode of tilting quad-rotor unmanned aerial vehicle based on online approximator
A tilting quadrotor, robust control technology, applied in the field of optimal robust control of tilting quadrotor UAV transition flight mode, can solve the problems of system modeling error, influence system anti-interference, transient disturbance and so on
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0090] The present invention will be further described below with reference to the specific embodiments:
[0091] This embodiment is employed Figure 4 System structure, image 3 The optimal robust control method based on the tilted four-rotorless transition flying mode based on the online approximator, the specific process is as follows:
[0092] S1, establish a dynamic model of tilting four-rotorless drone:
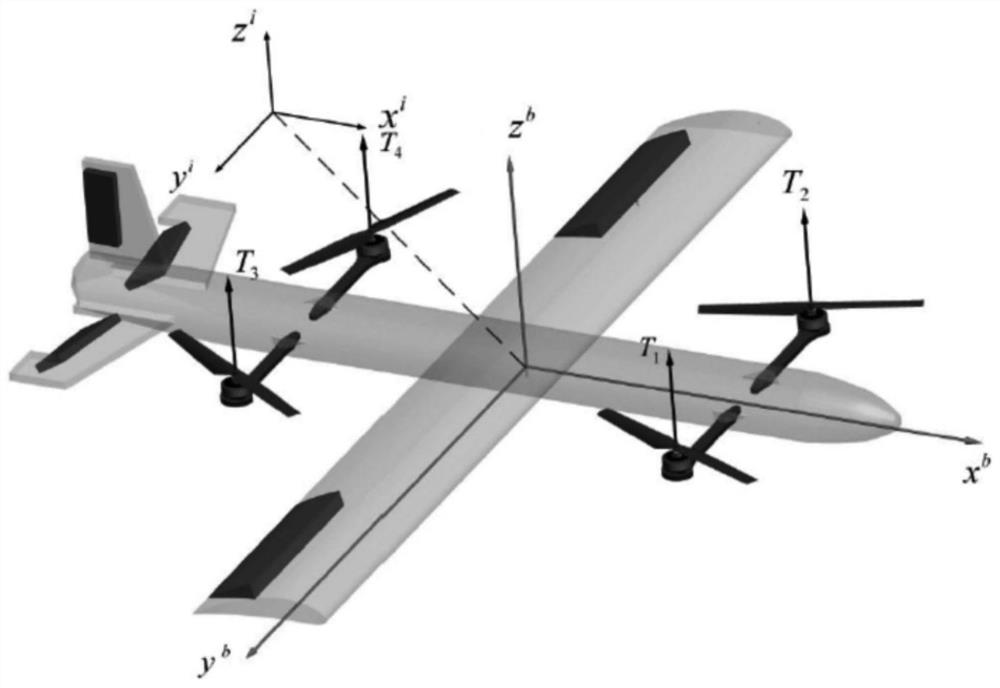
[0093] S1-1, first establish a correlation coordinate system of tilting four-rotorless drone, define three coordinate systems:
[0094] Inertial coordinate system: {i} = {x i Y i ,z i }, For the reference coordinate system fixed in the land, meet the right hand;
[0095] Body coordinate system: {b} = {x b Y b ,z b }, Indicating the right angle coordinate system fixed in the unmanned body, OX b The axis of the head direction, OY b The axis is perpendicular to the aircraft reference surface, and it points to the top, OZ b Axis vertical OX b y b The plane, pointing to the right, m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More