Tilting quadrotor unmanned aerial vehicle transition flight mode adaptive optimal sliding mode control method based on SDRE
A tilting quadrotor, optimal sliding mode technology, applied in attitude control, non-electric variable control, control/regulation system, etc., can solve the problems of large external interference, high noise immunity, complex dynamic characteristics, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0088] The present invention will be further described below in conjunction with specific embodiment:
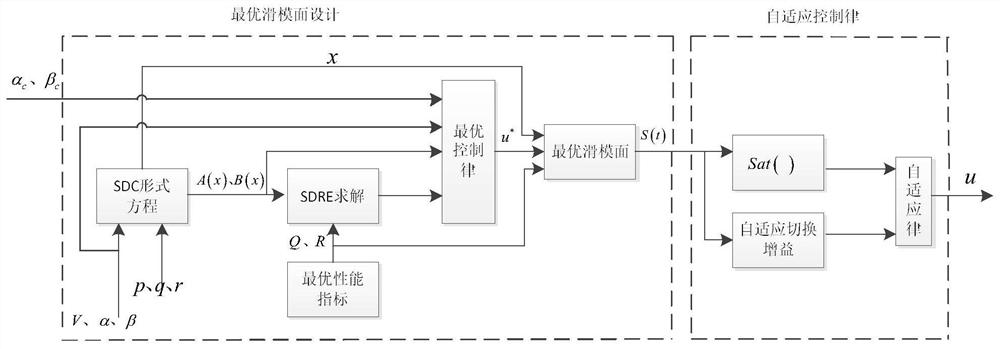
[0089] This embodiment adopts as Figure 4 system structure, such as image 3 The SDRE-based adaptive optimal sliding mode control method for the transitional flight mode of the tilting quadrotor UAV is as follows:
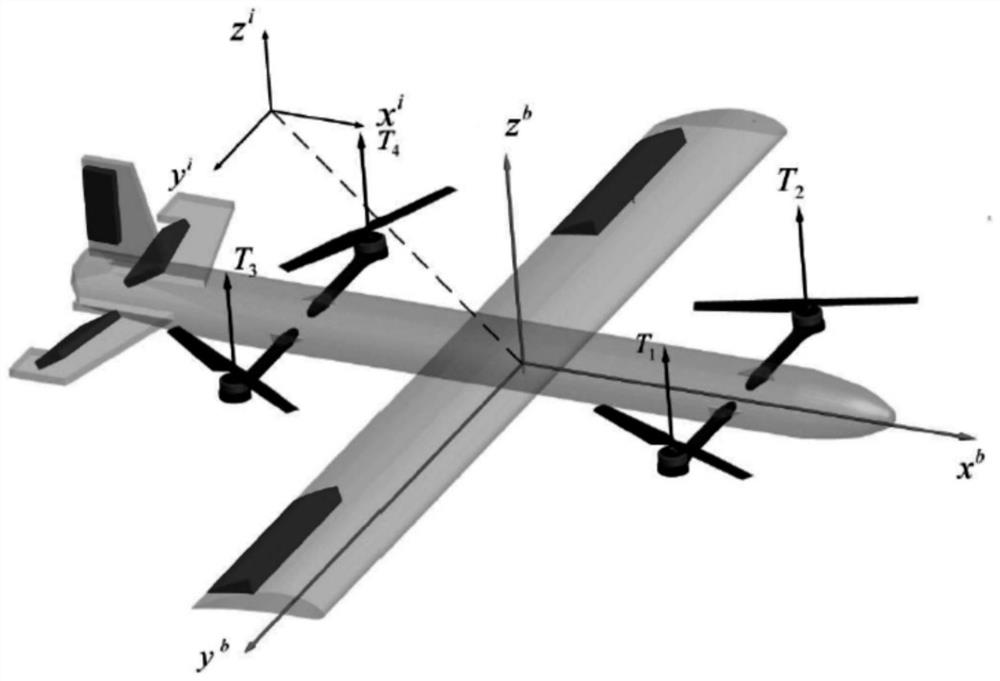
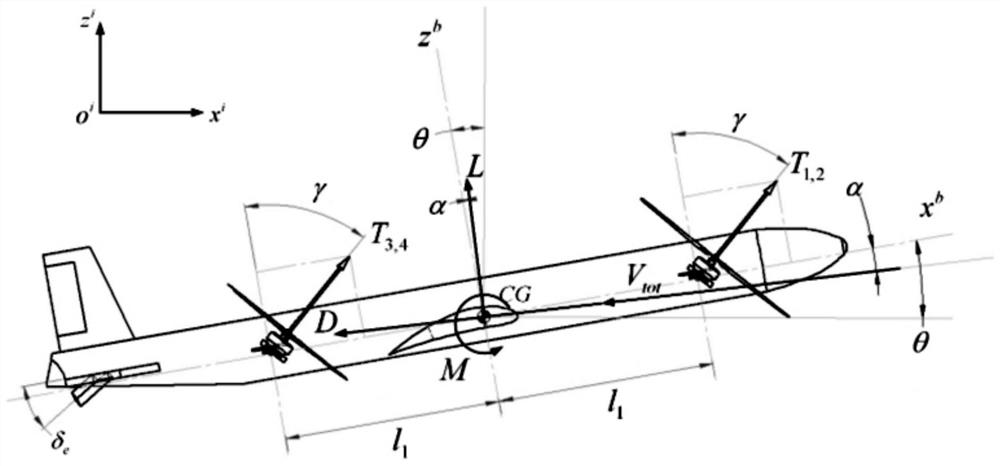
[0090] S1. Establish the dynamics and kinematics model of the tilting quadrotor UAV, namely: {I}={x in the inertial coordinate system i ,y i ,z i}, body coordinate system {B}={x b ,y b ,z b}, {W}={x in wind axis coordinate system w ,y w ,z w} to establish the kinematics and dynamics equations, as follows:
[0091] For the inertial coordinate system {I}={x i ,y i ,z i}, which is a reference coordinate system fixed on the earth, which satisfies the right-hand rule, and the following kinematic equations are obtained, where θ and ψ are the roll, yaw and pitch angles of the UAV in the inertial coordinate system:
[0092]
[0093] For the body coord...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More