A Nonlinear Model Predictive Controller for Vehicle Horizontal and Longitudinal Coupling Based on Parallel Newton Solving
A nonlinear model, predictive controller technology, applied in adaptive control, general control systems, control/regulation systems, etc., can solve the problems of complex vehicle system structure, large computational burden, and difficulty in solving time to meet system real-time requirements. , to speed up the solution speed, reduce the computational burden, and ensure the accuracy of the model
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention will be further described below in conjunction with the accompanying drawings.
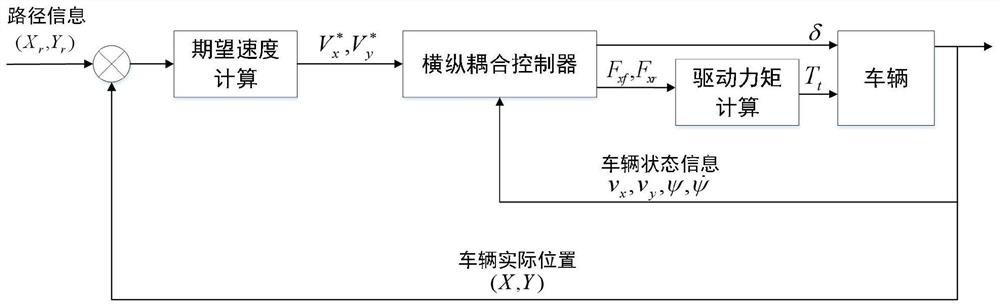
[0025] as attached Figure 1-7 As shown, the control block diagram of vehicle transverse and longitudinal coupling nonlinear model predictive control in the present invention is as follows figure 1 As shown in the figure, the speed calculation module and the horizontal and vertical coupling controller are written in .m files, and the driving torque calculation module uses the calculation formula T t =(F xf +F xr )R e The driving force of the front and rear wheels is converted into driving torque to act on the vehicle, and the vehicle system is built in Simulink.
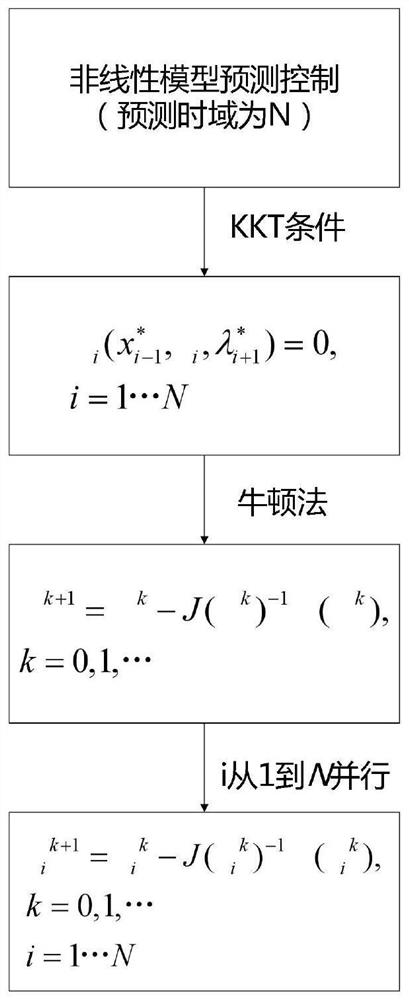
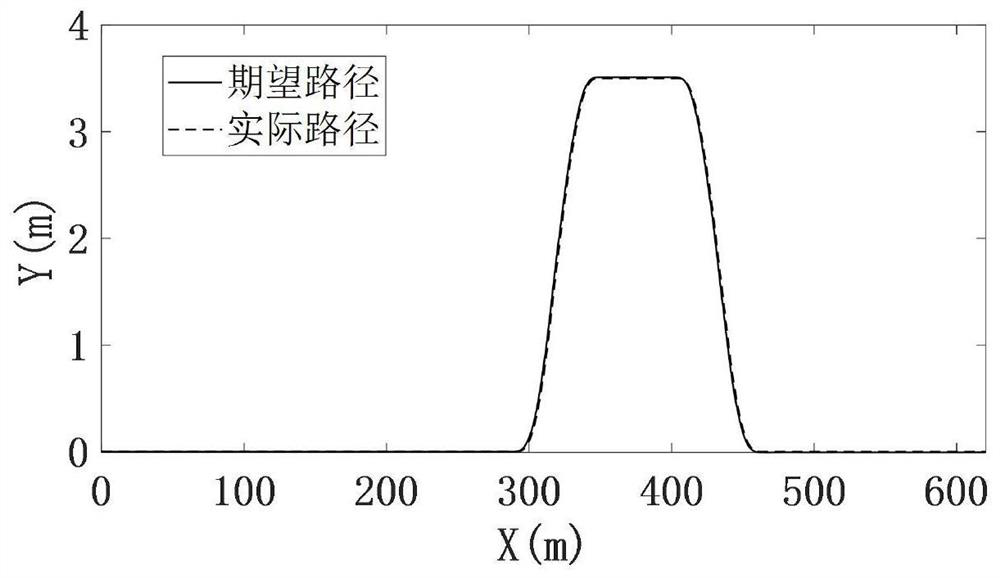
[0026] The control objective of the present invention is to use the parallel Newton optimization algorithm to obtain the control quantity of the horizontal and vertical coupling nonlinear predictive controller according to the expected path information and the state information of the vehicle system. By c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More