

Multi-objective constrained low-altitude unmanned aerial vehicle route planning design method
A design method and route planning technology, applied in multi-aircraft traffic management, unmanned aircraft, aircraft navigation/guidance tools, etc., can solve the problems of high real-time model requirements and high density of drones
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The present invention will be further described in detail below in conjunction with the accompanying drawings.
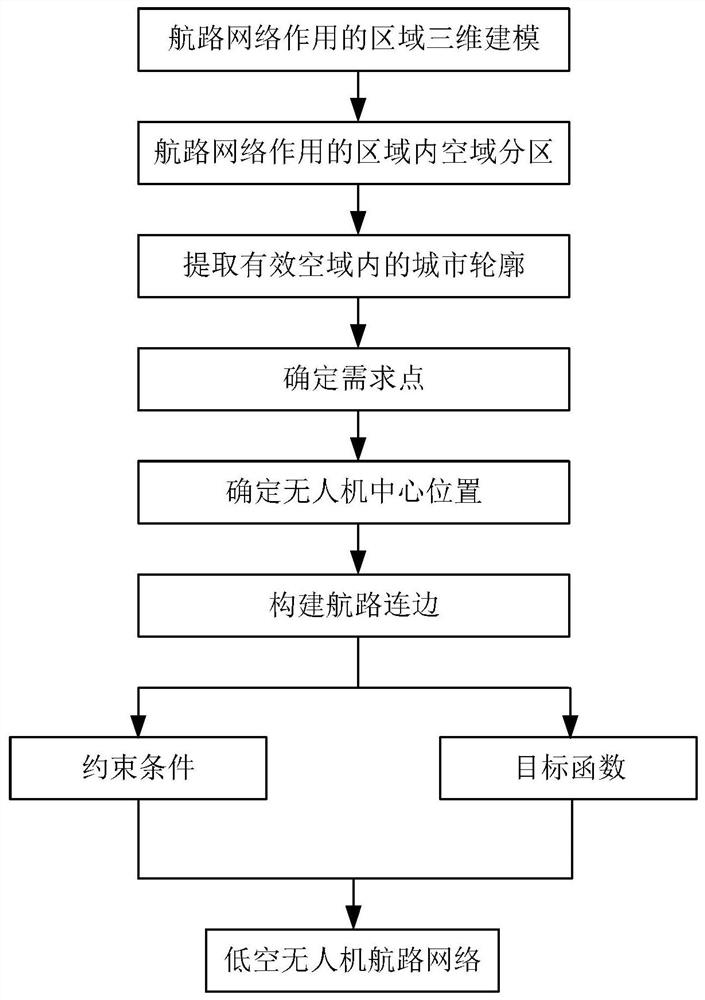
[0023] The route planning and design method of the low-altitude unmanned aerial vehicle with multi-objective constraints of the present invention, such as figure 1 Shown: The specific steps are:
[0024] Step 1: Determine the area where the route network acts, and perform 3D modeling of the area.
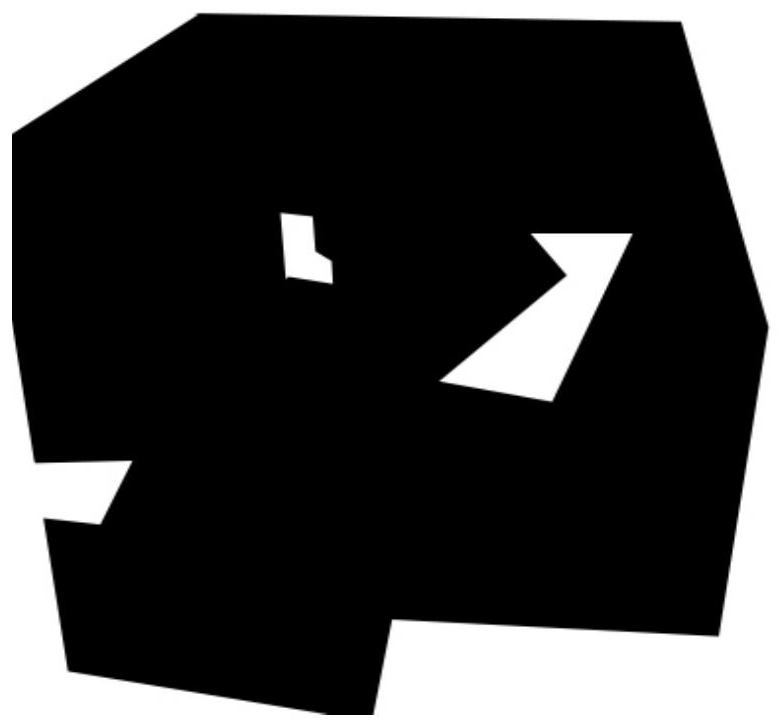
[0025] Step 2: Partition the airspace in the area determined in Step 1;
[0026] Since most urban areas have key areas such as hospitals and schools, in order to reduce the impact of drone flights and reduce the possibility of mid-air collisions, the airspace in this area is divided into free-flying airspace and restricted-flying airspace. Airspace and no-fly airspace, in which drones can fly freely in free-fly airspace, drones in restricted flight airspace can only fly along the established route, and drones in no-fly airspace are not allowed to fly. The above-...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More