

A method for vehicle trajectory tracking control
A trajectory tracking and control method technology, applied in the direction of control devices, etc., can solve the problems of simplification of driving assistance system mode, increase of driver burden, and inability to provide personalized assistance, so as to reduce driving burden, avoid manipulation interference, and improve tracking effect Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0088] In order to facilitate the understanding of those skilled in the art, the following description of the invention will be made in conjunction with the drawings, and the contents mentioned in the present invention are not limited.
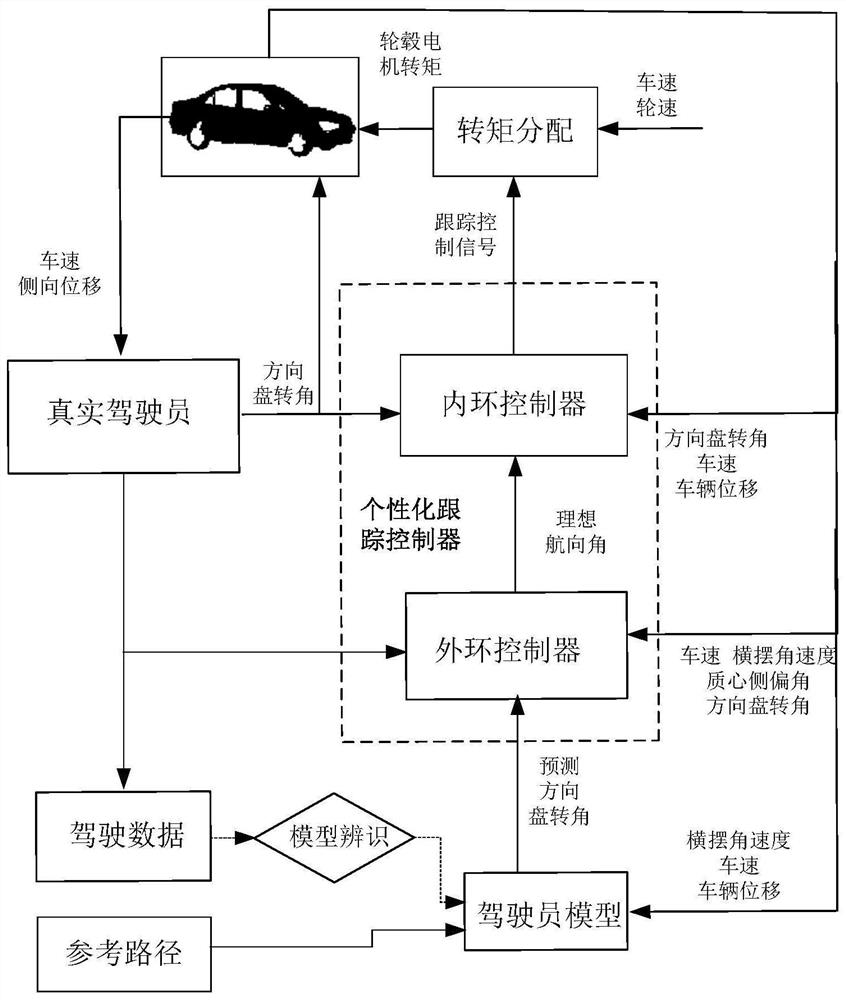
[0089] Refer figure 1 As shown, a car trajectory tracking control method of the present invention is as follows:
[0090] 1) Identify the driver model based on neural network:
[0091] Establish the driver model for:
[0092]
[0093] Among them, θ sw For driver steering wheel corner; Θ sw First order derivative; τ p Is the driver's pre-aimation; g h Turn to proportional gain; τ d2 Time constant for reacting delay for driver; y d For the lateral displacement of the expected path; Y d First-order derivative; y is the lateral displacement at the current time of the vehicle; V x For the current vehicle speed; φ is the car direction;
[0094] During the steering, it is assumed that the vehicle speed is set, and the above formula (1) is assigned, t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More