

Mobile robot path planning method based on improved A * algorithm
A mobile robot and path planning technology, applied in the direction of instruments, non-electric variable control, two-dimensional position/channel control, etc., can solve the problems of steep paths, collisions, and obstacle collisions generated by algorithms, and achieve reasonable paths and reasonable improvements performance, collision avoidance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
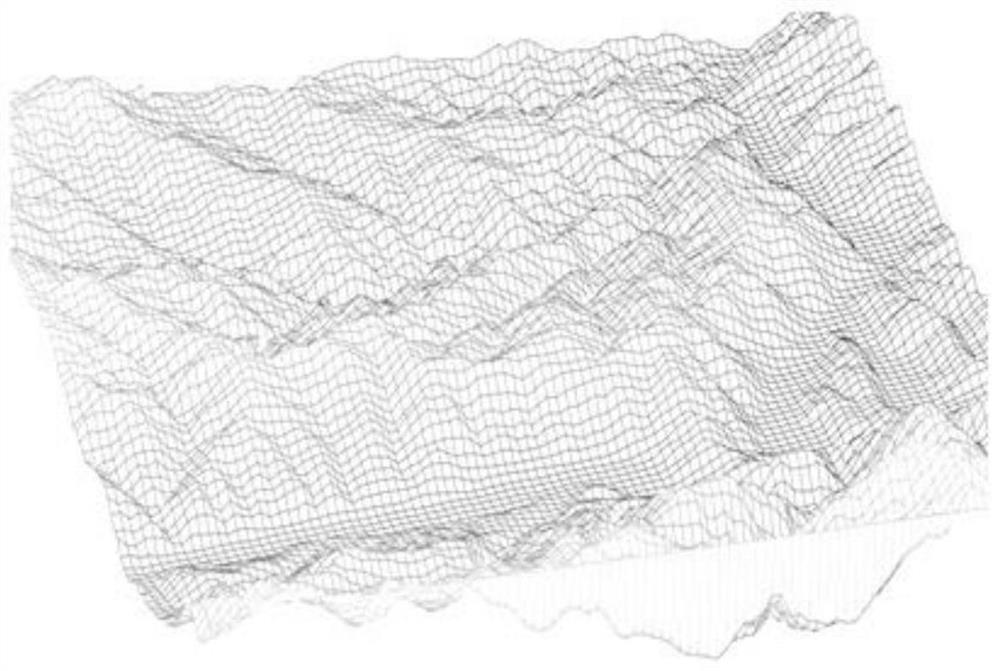
[0110] In the case of barrier-free, the shortest path obtained by the traditional A* algorithm without considering the height information is as follows Figure 5 As shown by the dotted line, although this path is the shortest path in theory, it does not consider the influence of complex terrain on the mobile robot's action. In this terrain environment, the path planning problem should take more consideration of the actual terrain factors. Such as Figure 5 The solid line shows that the A* algorithm, which improves the calculation method of the cost function, considers the terrain conditions more fully than the former. Although the path is longer, the generated path is smoother and more passable.
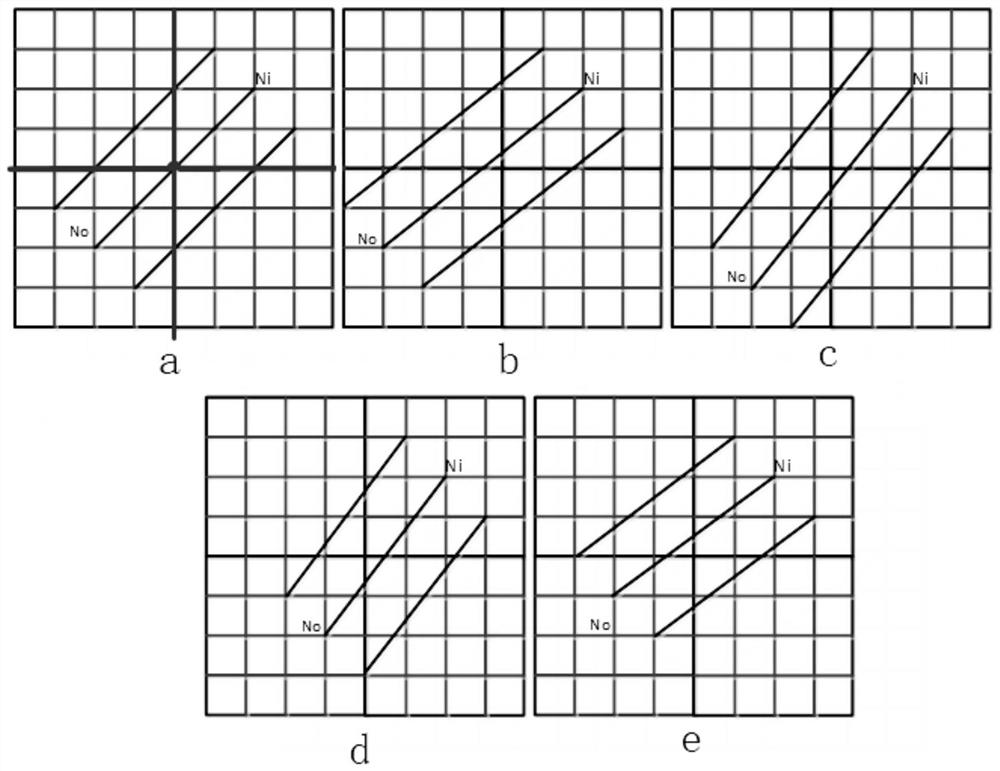
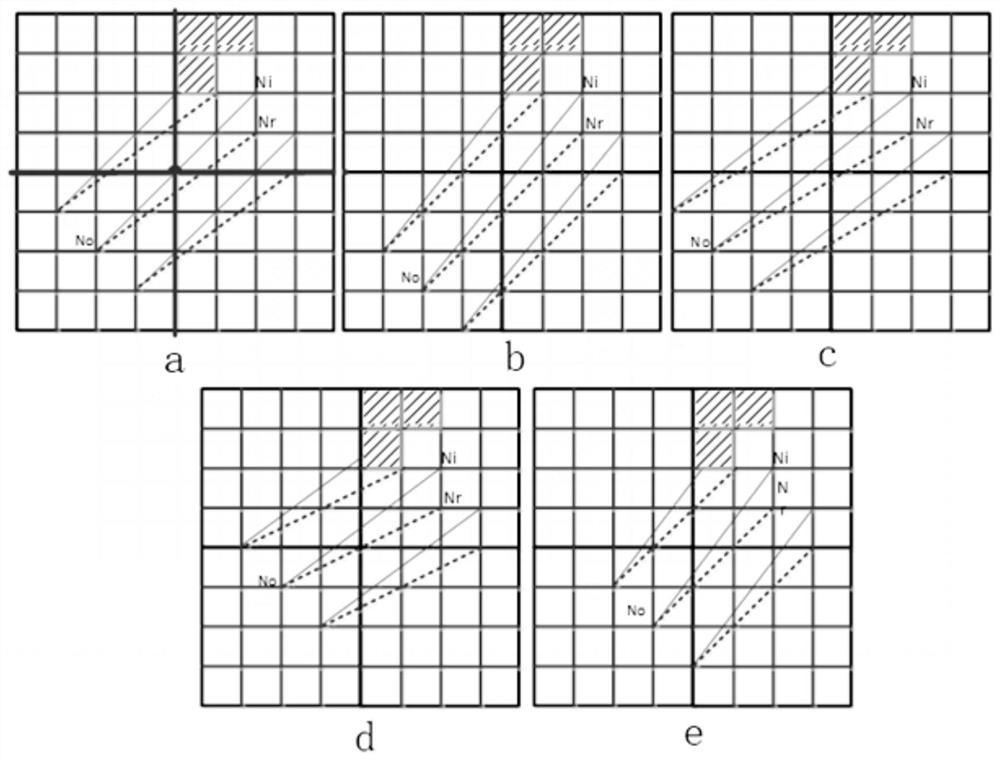
[0111] On the basis of improving the cost function, further verify the problem of whether the plan collides with obstacles in the path under the consideration of the volume of the mobile robot itself, and discuss it when the target neighborhood nodes are in the horizontal direction a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More