

Self-adaptive variable-attitude unmanned aerial vehicle capable of achieving aerial, water surface and underwater flight as well as control method thereof
An adaptive and attitude-changing technology, applied in the field of drones, can solve the problems of limited use of drones, and achieve the effects of guaranteed endurance, small diameter, and low air resistance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] According to the attached Figure 1 ~ Figure 4 , give a preferred embodiment of the present invention, and give a detailed description, so that the functions and characteristics of the present invention can be better understood.
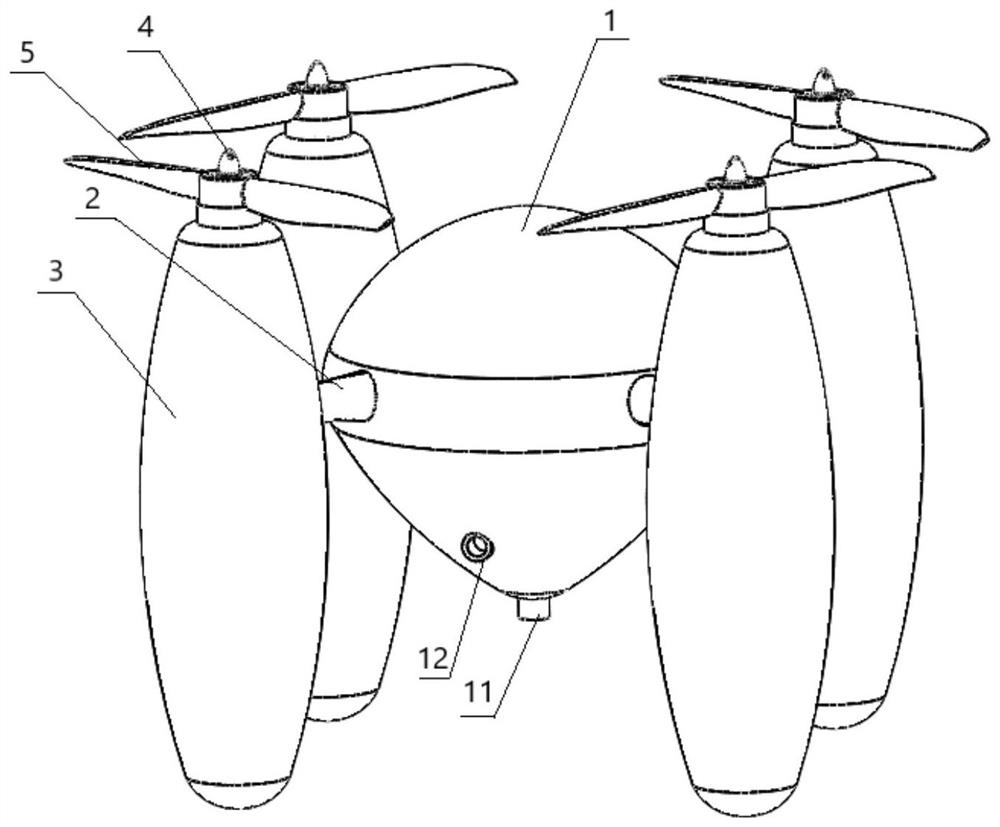
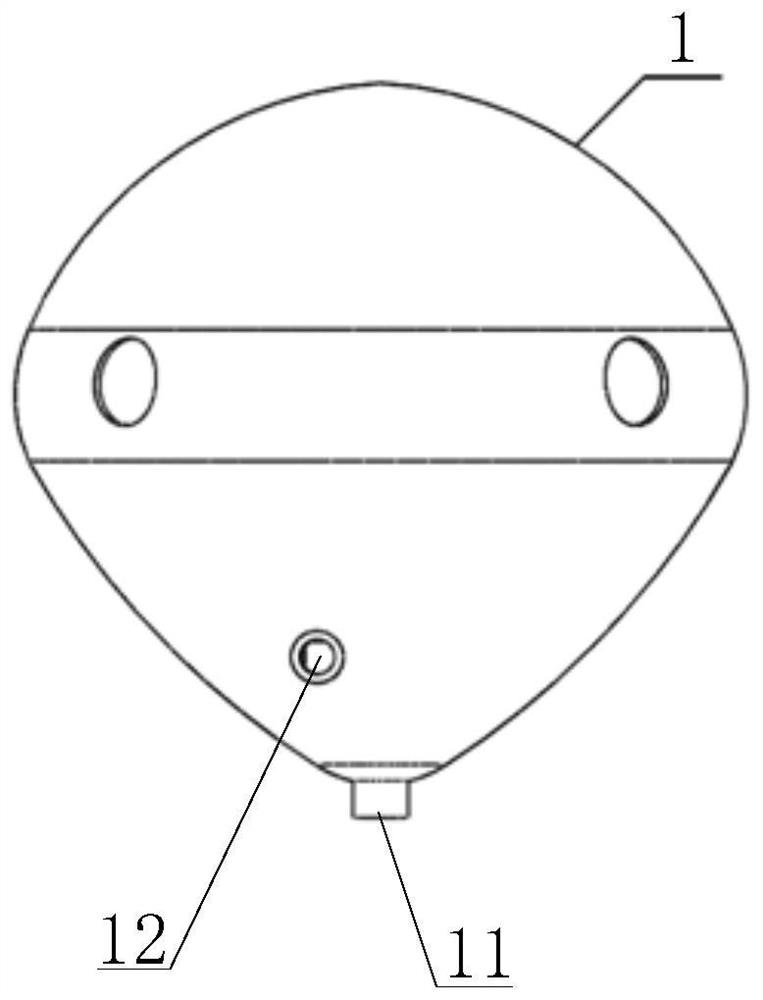
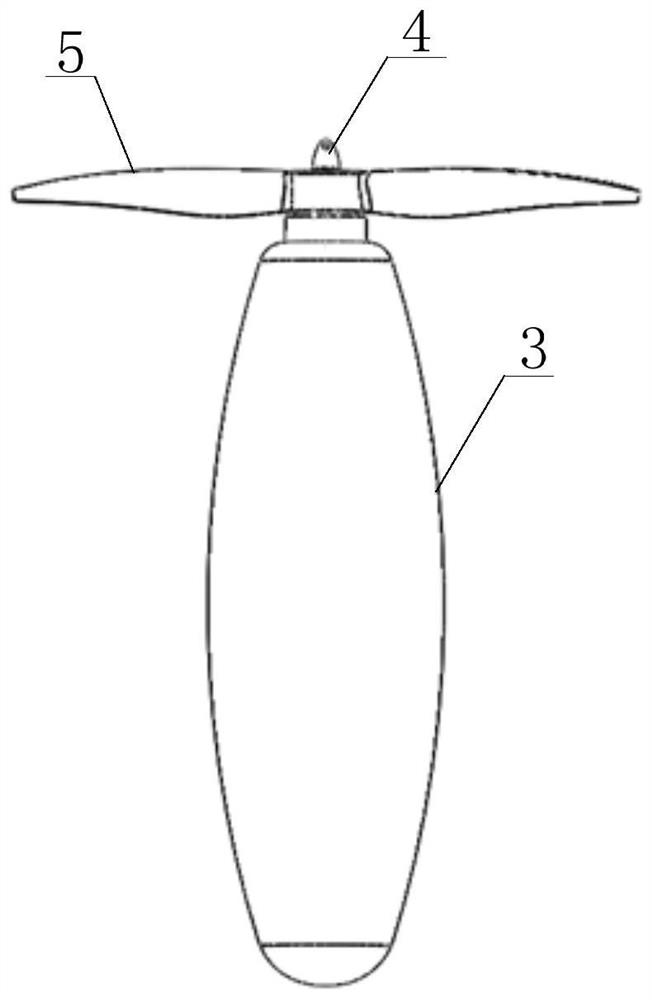
[0030] see figure 1 , an adaptive attitude-variable air surface diving UAV according to an embodiment of the present invention, comprising a body 1, a water pump, four arms 2, four buoyancy devices 3, four DC brushless motors 4 and four dual-use propellers 5; The buoyancy device 3 is evenly arranged on the outer periphery of the body 1 and is respectively connected to the body 1 through the machine arm 2; the DC brushless motor 4 is fixed in the buoyancy device 3, and the output shaft of the DC brushless motor 4 extends out of the buoyancy device 3 from the top of the buoyancy device 3 Outside; the dual-purpose propeller 5 is connected to the output shaft of the brushless DC motor 4; the buoyancy device 3 is hollow, and each buoyancy device 3...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More