

A Shared Control Method for EEG Mobile Robots in Unknown Environment
A mobile robot and shared control technology, applied in the field of robotics, can solve the problems that the shared method is not stable enough, the practicability is not high, and the forward trajectory is easy to shake, so as to improve the control efficiency and human-computer interaction ability, and improve the efficiency of obstacle avoidance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0054] The present invention will be further explained below in conjunction with the accompanying drawings and specific embodiments. It should be understood that the following specific embodiments are only used to illustrate the present invention and are not intended to limit the scope of the present invention.
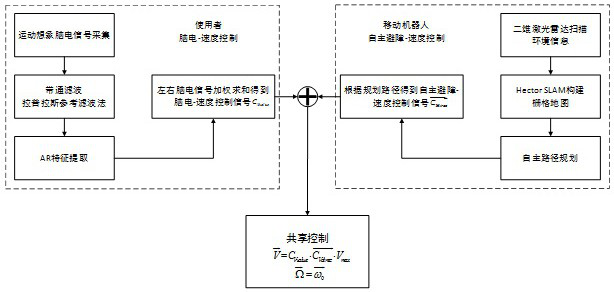
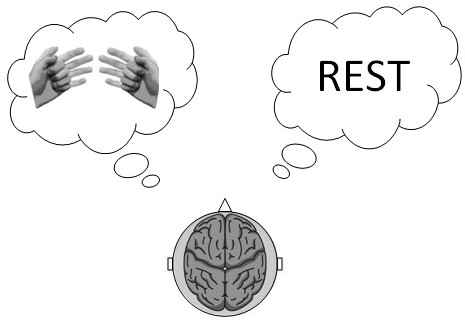
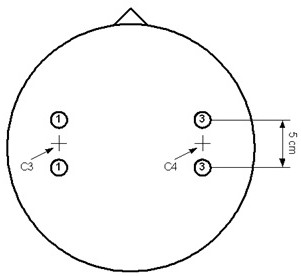
[0055] This embodiment provides a shared control method for an EEG mobile robot in an unknown environment, which includes the following steps: (1) collecting the user's motor imagery EEG signal and performing preprocessing and feature extraction; The electrical signals are linearly summed with adaptive weights to obtain the EEG-speed control signal; (3) the mobile robot obtains the autonomous obstacle avoidance-speed control signal according to the autonomous path planning; (4) the mobile robot is controlled by the EEG-speed Shared control of signals and autonomous obstacle avoidance-speed control signals for driving in unknown environments.
[0056] 1. Collect the mo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More