

Integrated control design method of ship-borne unmanned aerial vehicle arresting landing and escape re-flight
A design method and unmanned aerial vehicle technology, applied in the direction of non-electric variable control, control/regulation system, three-dimensional position/channel control, etc., can solve the problem that shipborne unmanned aerial vehicles cannot escape and go around in time and safely, and achieve the guarantee safety effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 2
[0041] An integrated control design method for a shipborne unmanned aerial vehicle to arrest a ship and escape and go around, the specific steps of which include:
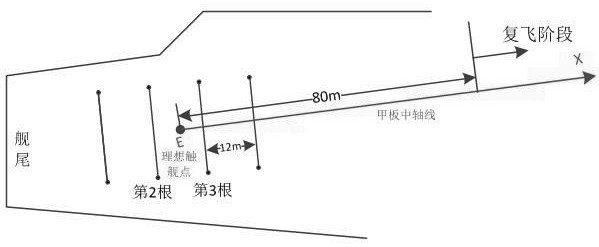
[0042] Step 1: Design the control strategy before landing: the control strategy of the longitudinal elevator control channel continues the control strategy of the air section, and the control strategy based on the pitch angle rate is adopted in the control strategy of the inner ring of the elevator. In order to suppress the influence of the ship wake on the ship landing , the guidance ring adopts the control strategy based on the skyward velocity.
[0043] The elevator controls are as follows:
[0044] δ E = K 1 Q+K 2 ∫(Q-Q g )dt
[0045]
[0046]
[0047] where δ E is the elevator control command, Q, Q g are the pitch rate and its command signal, respectively, Respectively, the sky direction speed and its command signal, H, H g are the height signal and its command signal respectively, K 1 、K 2 、...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More