

Unmanned robot management method and system
A technology of unmanned driving and management methods, applied in the field of unmanned robot management methods and systems, can solve problems such as unmanageable, low work efficiency, unmanned robots cannot plan paths, etc., to ensure work operation efficiency, timely and effective The effect of charging
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
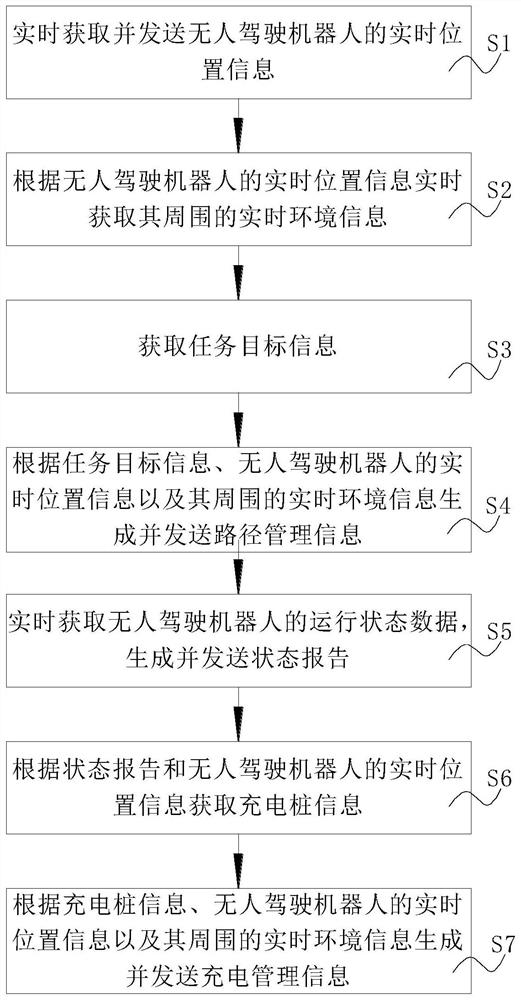
[0062] Such as figure 1 As shown, in the first aspect, the embodiment of the present invention provides a method for managing an unmanned robot, comprising the following steps:
[0063] S1. Obtain and send the real-time location information of the unmanned robot in real time;
[0064] S2. According to the real-time location information of the unmanned robot, the real-time environment information around it is obtained in real time;
[0065] S3. Obtain task target information;
[0066] S4. Generate and send route management information according to the task target information, the real-time position information of the unmanned robot and the real-time environment information around it;
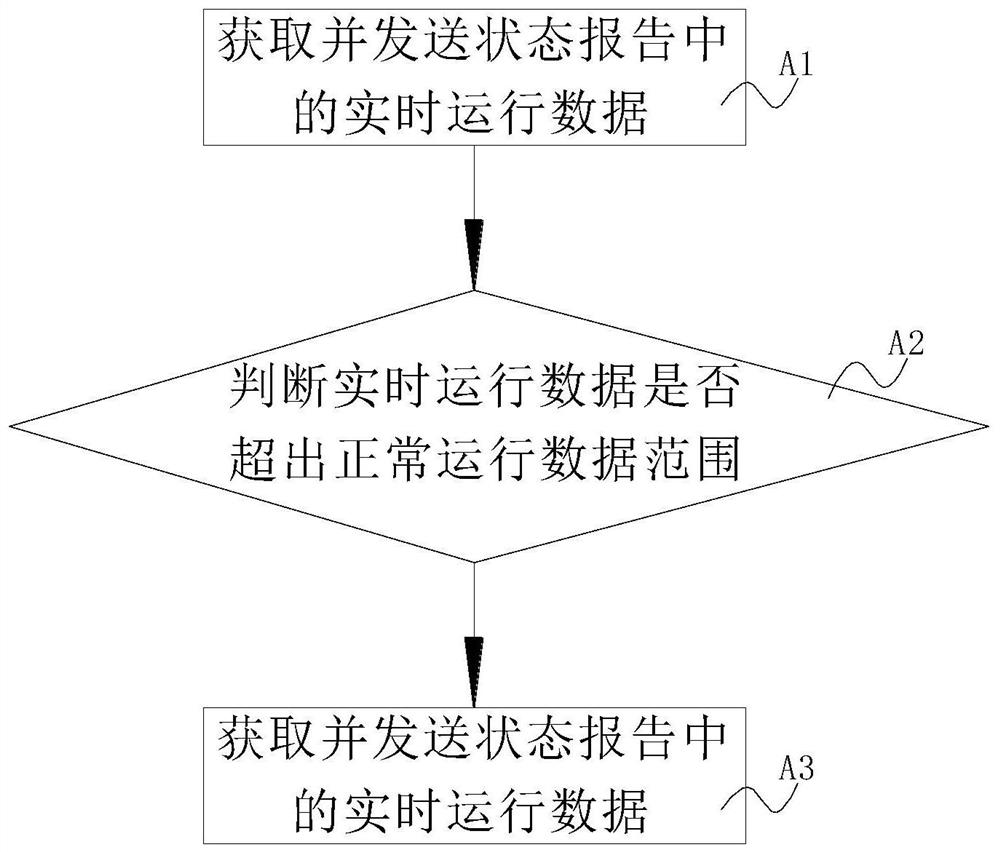
[0067] S5. Obtain the operating status data of the unmanned robot in real time, generate and send a status report;
[0068] S6. Obtain charging pile information according to the status report and the real-time location information of the unmanned robot;
[0069] S7. Generate and send charging...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More