

Unmanned aerial vehicle group control method and device
A control method and control device technology, applied in the field of unmanned aerial vehicles, can solve the problems that affect the overall control of unmanned aerial vehicles, the control error is gradually enlarged, and the formation is out of control.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] In order to make the purpose, technical solution and advantages of the present application clearer, the present application will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present application, and are not intended to limit the present application.
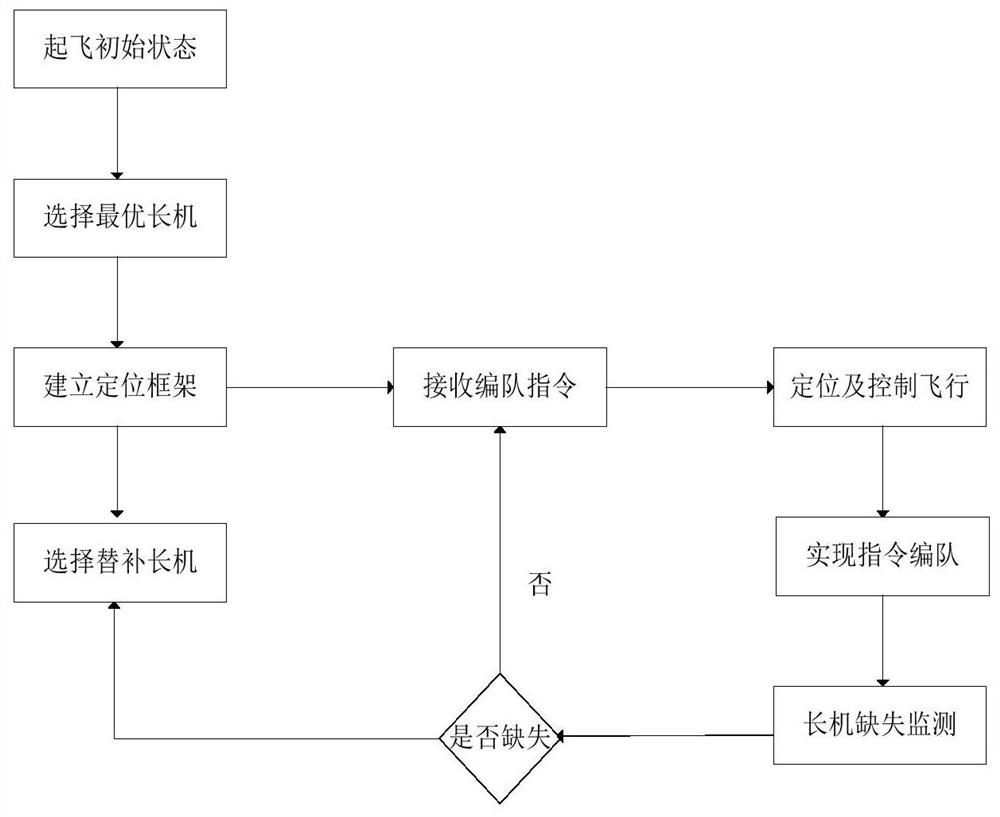
[0045] see figure 1 , the present application provides a method for controlling a UAV swarm, the method for controlling a UAV swarm includes:
[0046] Multiple UAVs in the UAV swarm activate themselves as the leader;
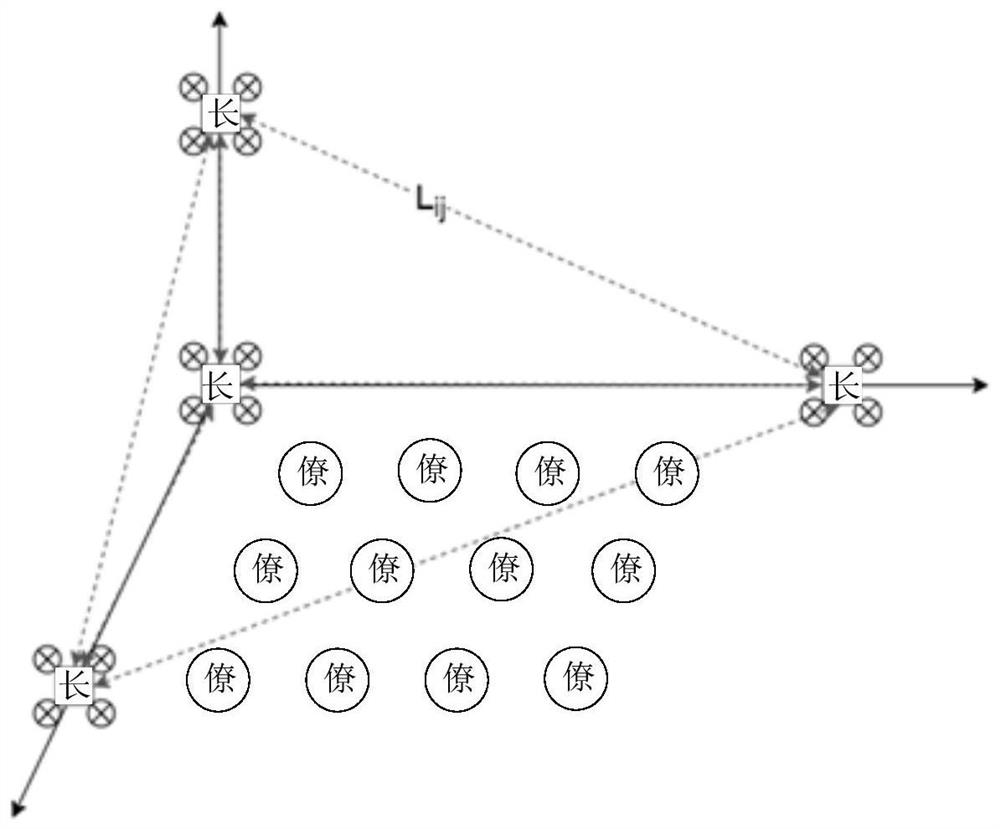
[0047] A plurality of said lead planes respectively send a first lead plane positioning signal to a plurality of wingmen in the drone group;
[0048] Each wingman receives a plurality of positioning signals of the first lead plane, and performs real-time positioning and calculation to control its own flight status, complete formation instructions and maint...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More