Obstacle trajectory prediction method and device, equipment and medium
A trajectory prediction and obstacle technology, which is applied in the direction of measuring devices, character and pattern recognition, radio wave measurement systems, etc., can solve the problems of long time consumption, low accuracy of obstacle trajectory prediction, and unreasonable path planning of unmanned equipment To achieve the effect of improving forecasting accuracy, optimizing forecasting methods, and taking into account real-time forecasting and forecasting accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
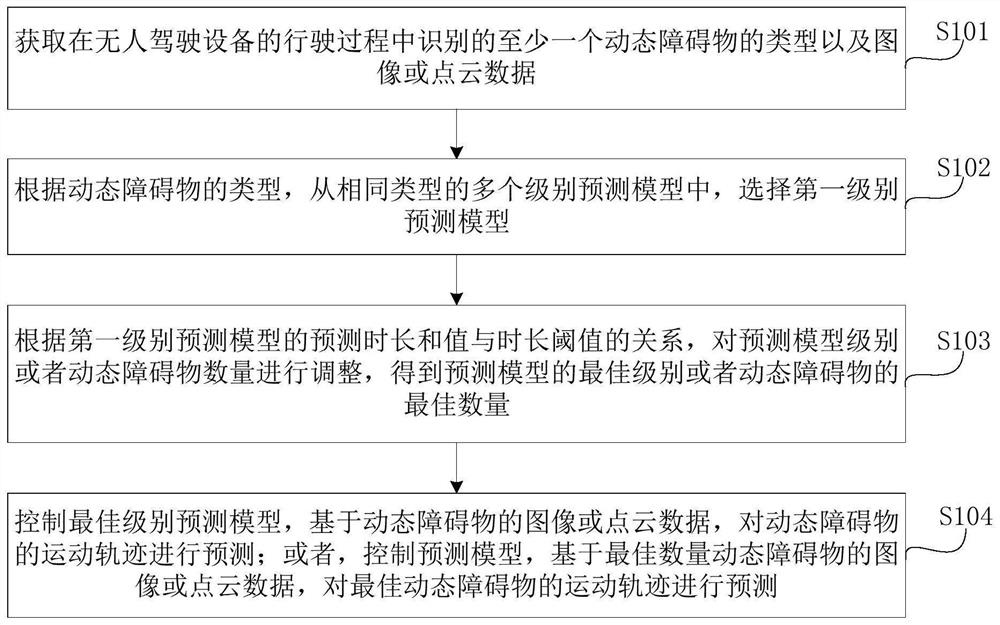
[0034] figure 1 It is a schematic flow chart of a method for predicting obstacle trajectories provided by Embodiment 1 of the present invention. This embodiment can be applied to the scene of predicting the trajectory of dynamic obstacles identified during the driving of unmanned equipment. The method can be composed of Obstacle trajectory prediction device can be implemented, the device can be composed of hardware and / or software, and can be integrated in electronic equipment. In this embodiment, the electronic device may be a vehicle-mounted terminal, an intelligent driving device, or a server device. The method specifically includes the following:
[0035] S101. Acquire the type and image or point cloud data of at least one dynamic obstacle recognized during driving of the unmanned device.
[0036] In this embodiment, the unmanned equipment may be, but not limited to: equipment capable of automatic driving, such as automatic driving vehicles, unmanned vehicles, unmanned a...
Embodiment 2
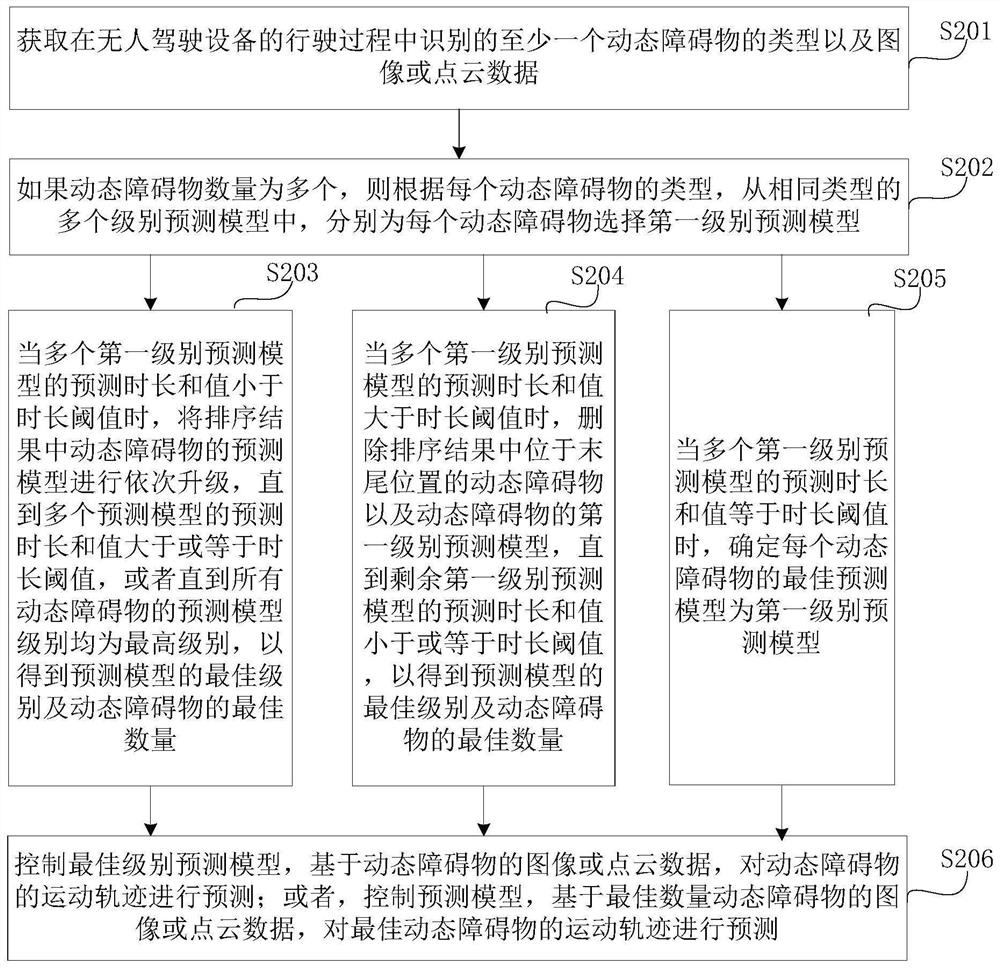
[0059] It can be known from the above introduction that the number of dynamic obstacles identified in the embodiment of the present invention is at least one. Combine below figure 2 , taking the number of dynamic obstacles as an example, the trajectory prediction of obstacles in the embodiment of the present invention will be further described. Such as figure 2 As shown, the method is as follows:
[0060] S201. Obtain the type and image or point cloud data of at least one dynamic obstacle recognized during driving of the unmanned device.
[0061] S202. If there are multiple dynamic obstacles, according to the type of each dynamic obstacle, select a first-level prediction model for each dynamic obstacle from multiple levels of prediction models of the same type.
[0062] Optionally, when there are multiple dynamic obstacles and the types of each dynamic obstacle are different, the electronic device in this embodiment may select from multiple prediction model types based on...
Embodiment 3
[0099] image 3 It is a schematic flow chart of an obstacle trajectory prediction method provided by Embodiment 3 of the present invention. On the basis of the above embodiments, in this embodiment, "upgrade the prediction models of dynamic obstacles in the sorting results sequentially until all The prediction duration and value of the multiple prediction models are greater than or equal to the duration threshold" for further optimization. Such as image 3 As shown, the method is as follows:
[0100] S301. Upgrade the first-level prediction model of the dynamic obstacle at the first position in the sorting result to a second-level prediction model, and determine the prediction duration and value of the second-level prediction model and other first-level prediction models Relationship to the duration threshold.
[0101] Since the dynamic obstacles in the sorting results are sorted according to the order of the obstacle scores from high to low, the dynamic obstacles at the fi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com