

PID parameter setting method based on step response characteristic data of controlled object
A step-response, controlled object technology, applied in electric controllers, controllers with specific characteristics, etc., can solve problems such as inability to tune PID parameters online
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
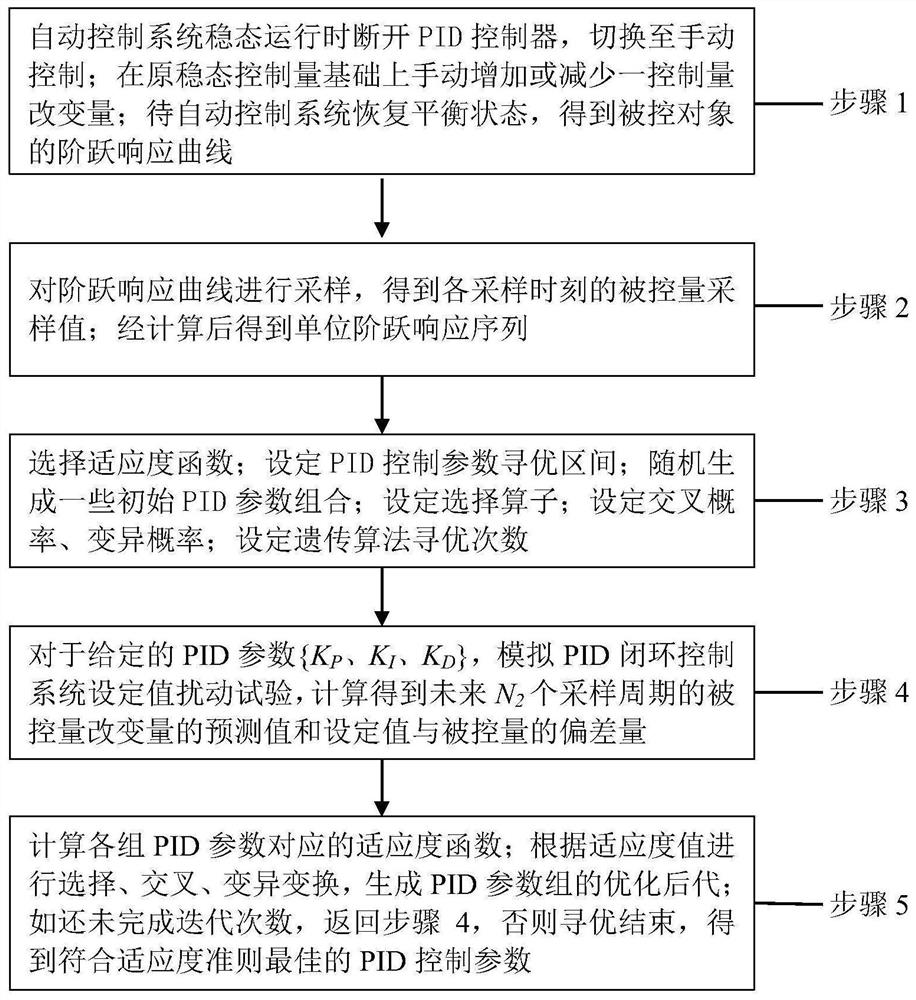
[0048] Such as figure 1 , in a specific embodiment of the present invention, a schematic flowchart of a PID parameter tuning method based on the step response characteristic data of the controlled object is shown.
[0049] A kind of PID parameter tuning method based on controlled object step response characteristic data, it comprises the following steps:
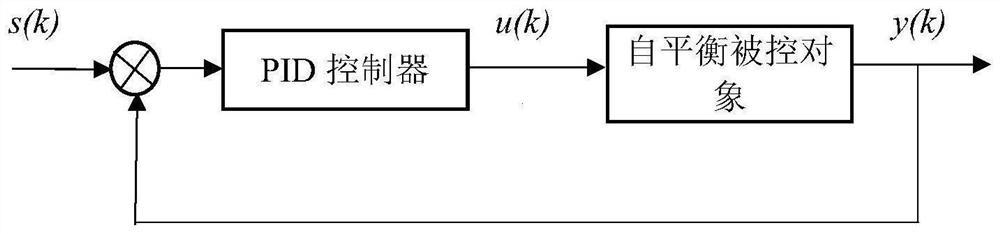
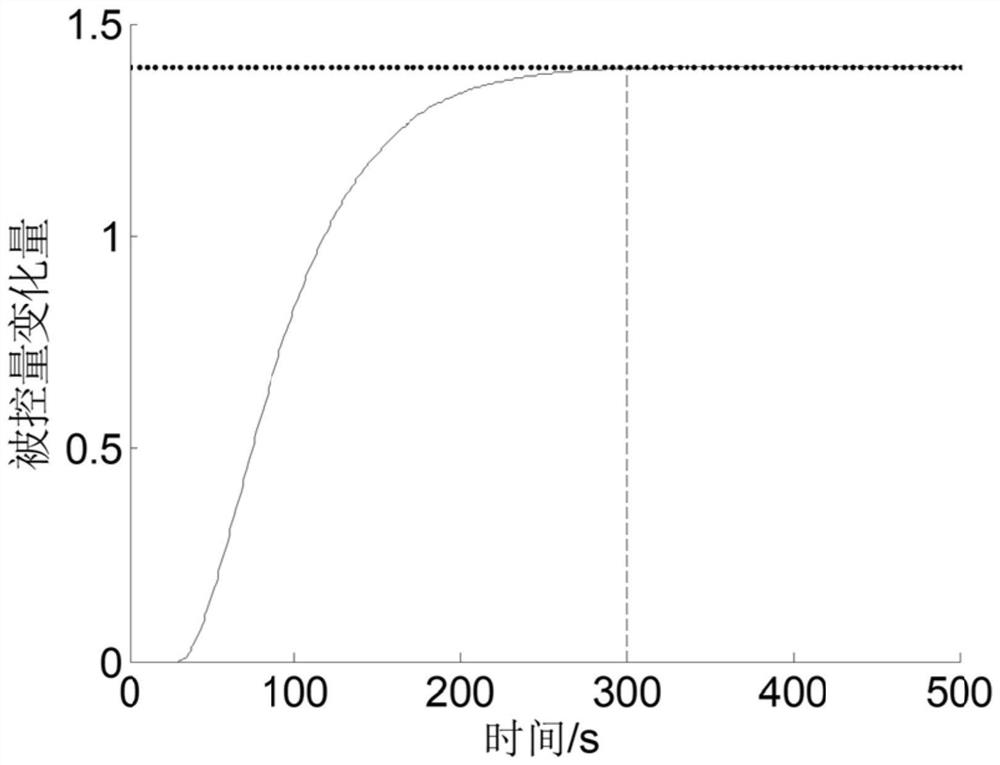
[0050] Step 1. When the automatic control system of the self-balancing controlled object is running in a steady state, disconnect the PID controller, and switch the automatic control system from the automatic control state to the manual control state; 0 Manually increase or decrease the control variable change u of a certain magnitude on the basis of ; wait for the automatic control system to return to the equilibrium state, and obtain the step response characteristic curve of the controlled self-balancing object.
[0051] Step 2, for the step response characteristic curve obtained in step 1, sample according to a certain s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More