Unmanned aerial vehicle landing area determination method and device, unmanned aerial vehicle and storage medium
A determination method and technology for drones, applied in the field of drones, can solve problems such as damage to drones, inability to meet landing requirements, and mechanical failures
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
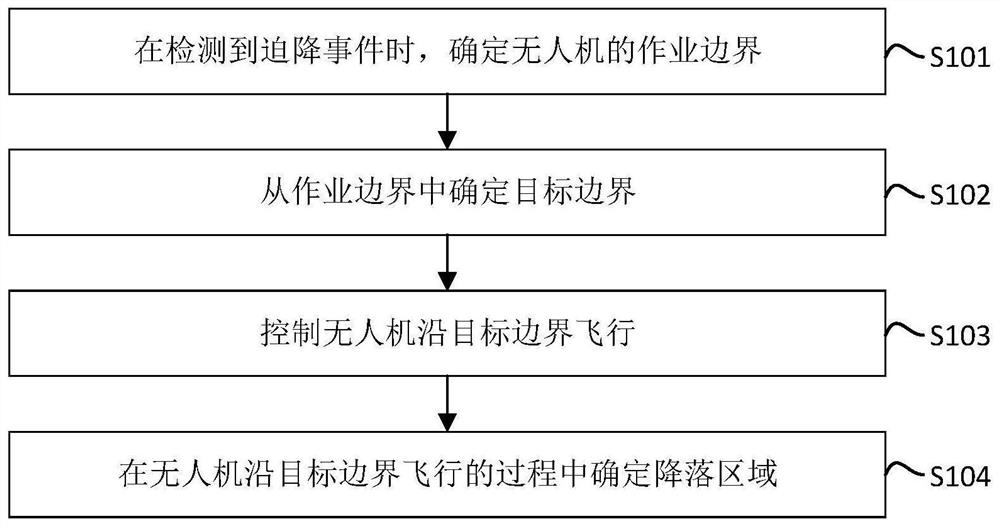
[0115] figure 1 It is a flow chart of the steps of a method for determining the landing area of a drone provided by Embodiment 1 of the present invention. This embodiment of the present invention is applicable to the situation of an emergency landing of a drone. The device for determining the landing area can be implemented by means of software and / or hardware, and integrated in the UAV, such as figure 1 As shown, the method specifically includes the following steps:
[0116] S101. When a forced landing event is detected, determine an operation boundary of the drone.
[0117] In the embodiment of the present invention, the forced landing event may be an event that causes the UAV to fail to continue its normal flight, for example, it may be a mechanical failure, insufficient power, or a sensor failure. The forced landing event can also be that the user sends a forced landing command to the UAV through the remote control, and the UAV forms a forced landing event according to...
Embodiment 2
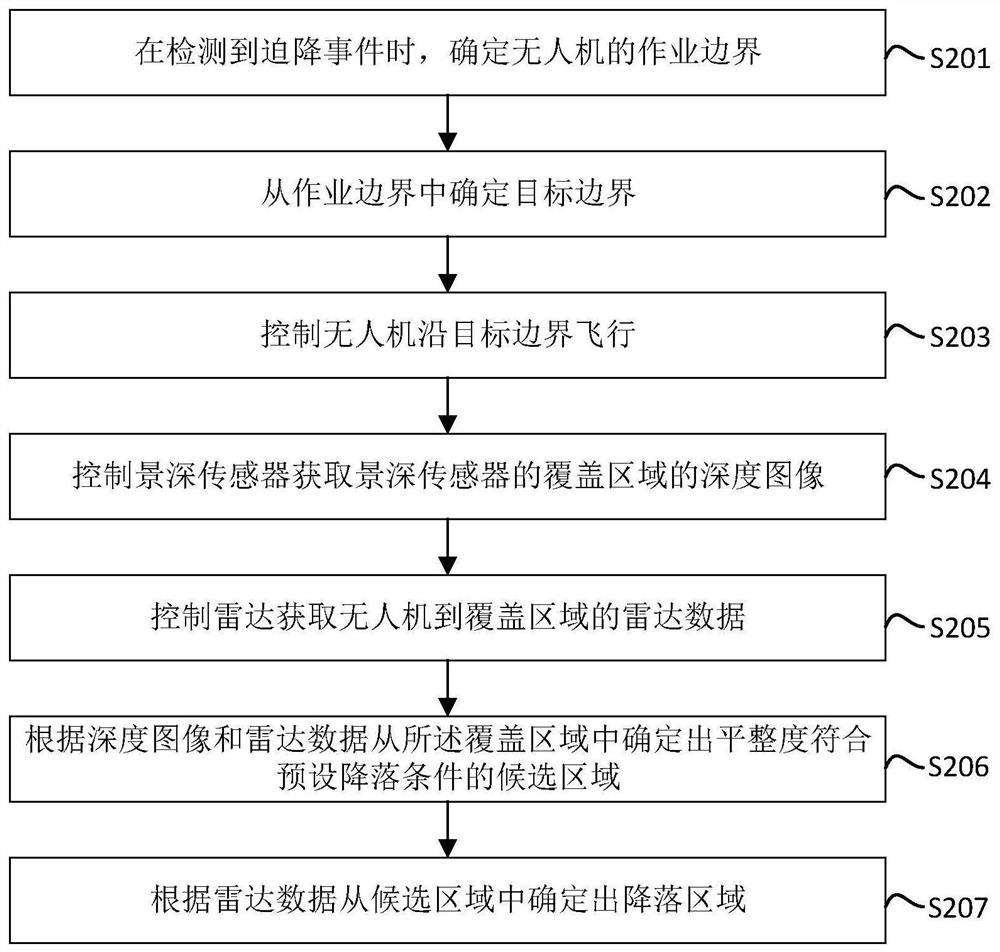
[0132] figure 2 It is a flow chart of the steps of a method for determining the landing area of a drone provided by Embodiment 2 of the present invention. The embodiment of the present invention is optimized on the basis of the foregoing Embodiment 1, and provides an exemplary implementation method for determining the landing area, specifically ,Such as figure 2 As shown, the method in the embodiment of the present invention may include the following steps:
[0133] S201. When an emergency landing event is detected, determine an operation boundary of the drone.
[0134] S202. Determine the target boundary from the operation boundary.
[0135] S203. Control the UAV to fly along the target boundary.
[0136] S204. Control the depth sensor to acquire a depth image of the coverage area of the depth sensor.
[0137] In practical applications, the UAV is equipped with a depth sensor and a radar. Both the depth sensor and the radar can face the bottom of the UAV. The depth ...
Embodiment 3
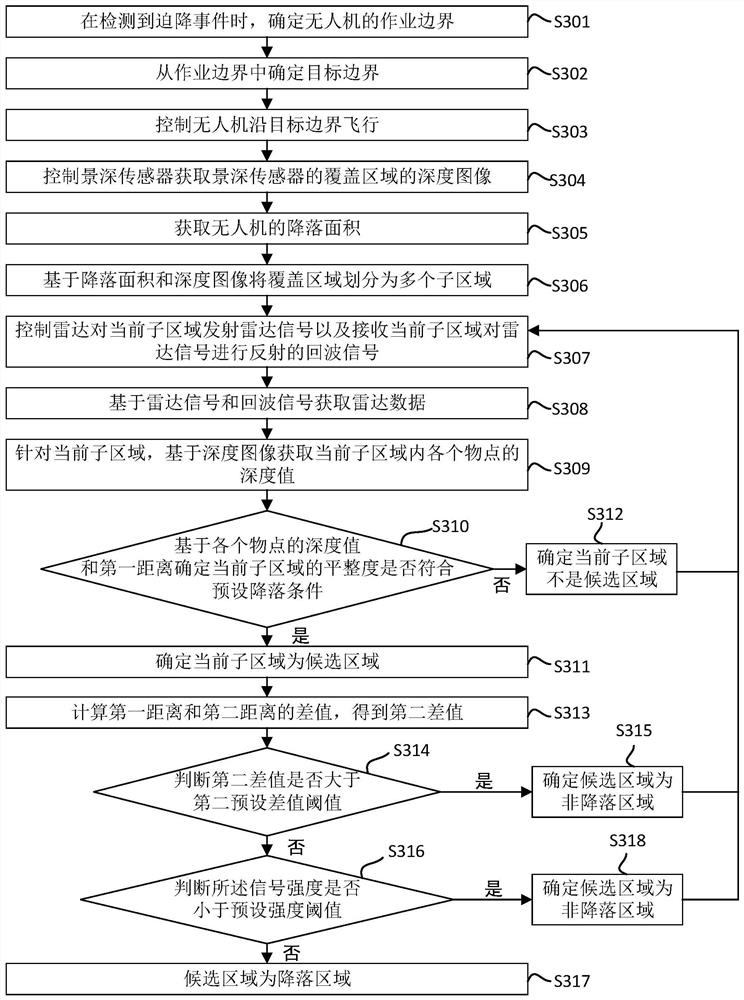
[0156] Figure 3A A flow chart of the steps of a method for determining the landing area of a drone provided by Embodiment 3 of the present invention. The embodiment of the present invention is optimized on the basis of the foregoing Embodiment 1, and provides an exemplary implementation method for determining candidate areas and landing areas , specifically, as Figure 3A As shown, the method in the embodiment of the present invention may include the following steps:
[0157] S301. When an emergency landing event is detected, determine an operation boundary of the drone.
[0158] S302. Determine the target boundary from the operation boundary.
[0159] S303. Control the UAV to fly along the target boundary.
[0160] S304. Control the depth sensor to acquire a depth image of the coverage area of the depth sensor.
[0161] S305. Obtain the landing area of the drone.
[0162] The landing area of the UAV is related to the external dimensions of the UAV. The landing d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More