Six-axis robot transfer device
A six-axis robot and transfer device technology, which is applied in the direction of manipulators, manufacturing tools, etc., can solve the problems of affecting the use effect of the equipment, the high quality of the six-axis robot, and the inability to use the convenient adjustment of the position, so as to improve the universality of use and the effect of use , the effect of convenient adjustment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
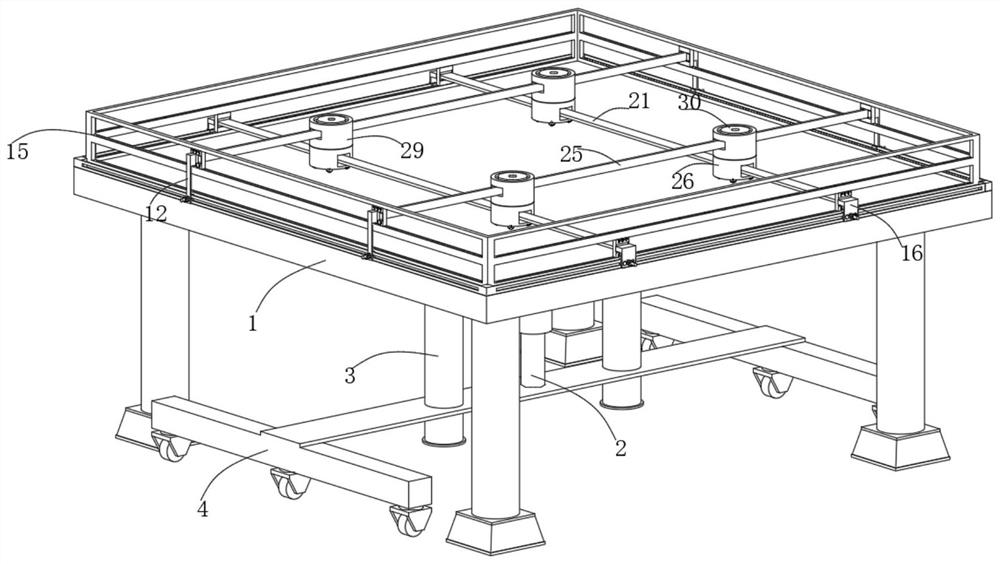
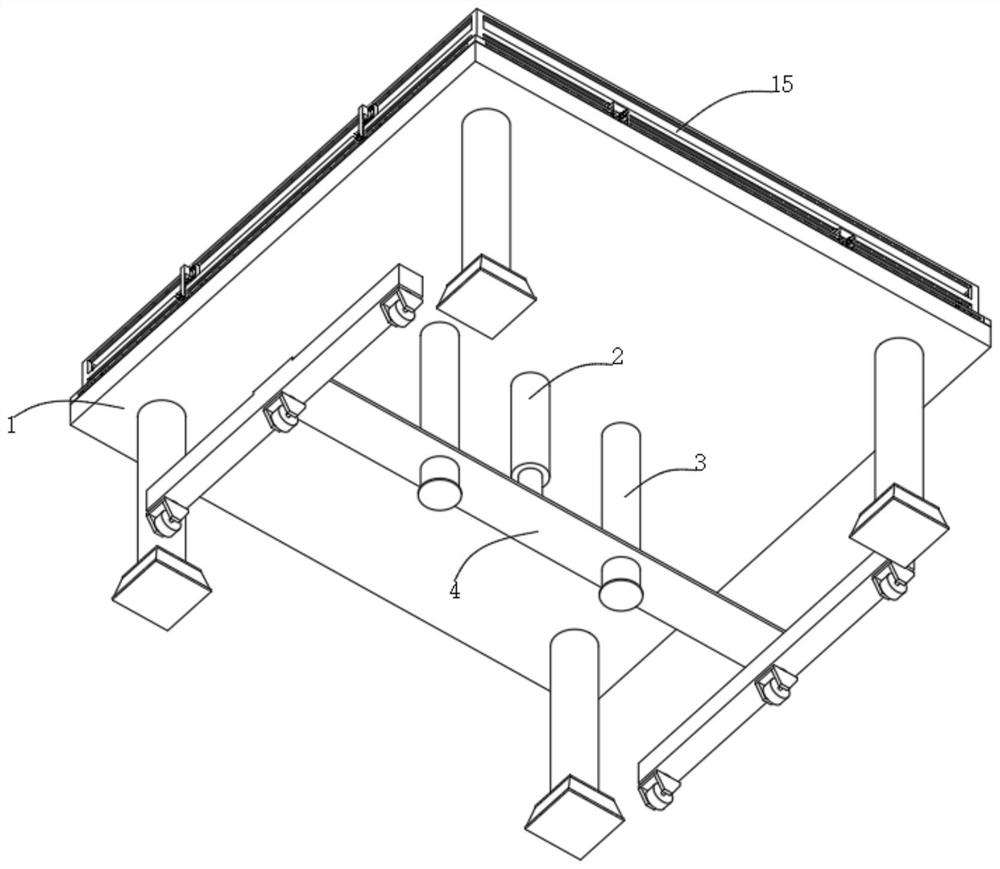
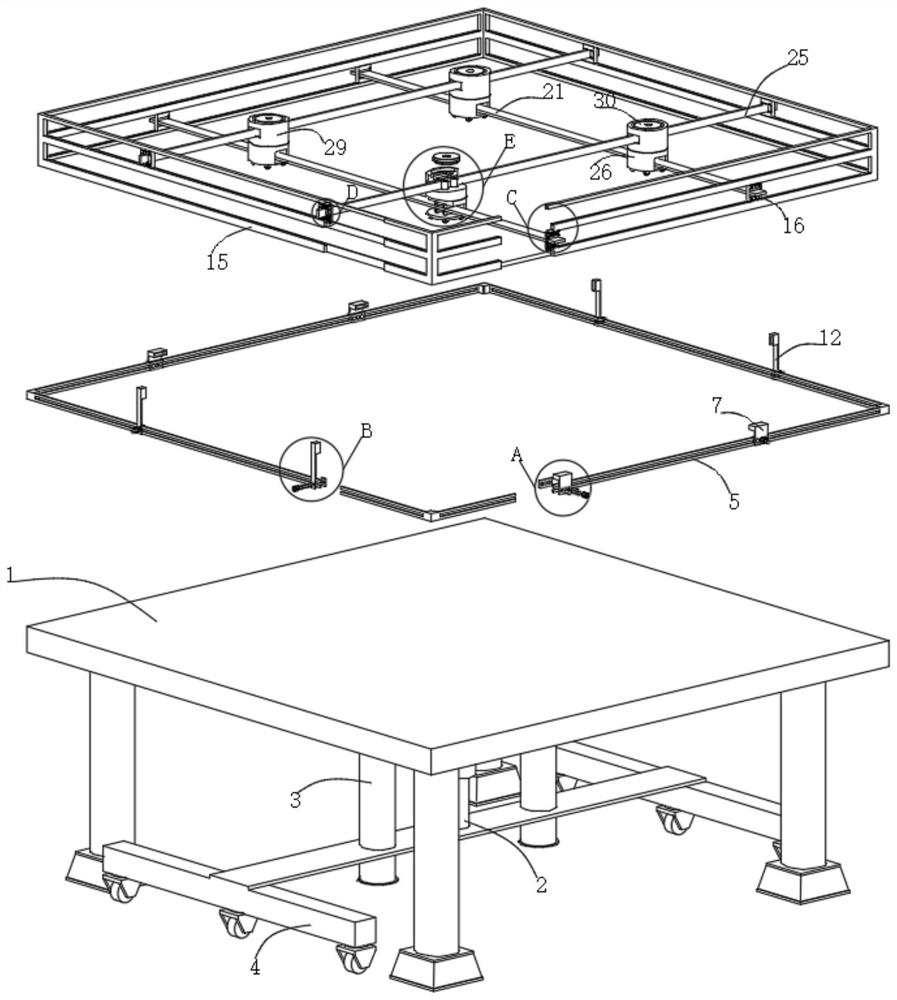
[0029] Embodiment one, with reference to Figure 1-10 : A six-axis robot transfer device, including a table body 1, a first slide bar 21 and a second slide bar 25, the establishment of the table body 1 provides the installation basis for other functional components of the equipment, the first slide bar 21 and the second slide bar The establishment of the bar 25 is convenient for the installation of the first support platform 26 and the second support platform 29. The top of the platform body 1 is fixedly connected with the limit frame 5, and the setting of the limit frame 5 is convenient for the first positioning bolt 6 and the second positioning bolt. 11, the center of the four outer surfaces of the limiting frame 5 is provided with positioning grooves, the positioning grooves are set up to facilitate the adjustment of the position movement of the first positioning bolt 6 and the second positioning bolt 11, and the four positioning grooves are divided into Two groups, wherein...
Embodiment 2
[0030] Embodiment two, refer to Figure 1-8 : the two sides of the center of the outer surface of each first positioning block 8 and the positioning rods 10 are embedded in the corresponding positioning grooves, and the setting of the positioning rods 10 can stabilize the first positioning block 8 and the first positioning frame 7 connection, one end of each positioning rod 10 extends to the inside of the corresponding first positioning frame 7, and the outer surface on one side of each first positioning frame 7 is attached to the outer surface on one side of the corresponding first positioning nut 9, and each first The outer surface of the other side of the positioning frame 7 and the corresponding side of the limiting frame 5 are all bonded. The establishment of this structure enables the first positioning nut 9 to effectively fix the use position of the first positioning frame 7. Each The outer surface on one side of the second positioning frame 12 and the outer surface on ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More