Multi-target tracking method based on adaptive extended Kalman probability hypothesis density filter
A probability hypothesis density, extended Kalman technology, applied in the field of multi-target tracking, can solve the problem that the EK-PHD filter cannot track the target, and achieve the effect of avoiding participation in the update process and overcoming the inability to track the target
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] The technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
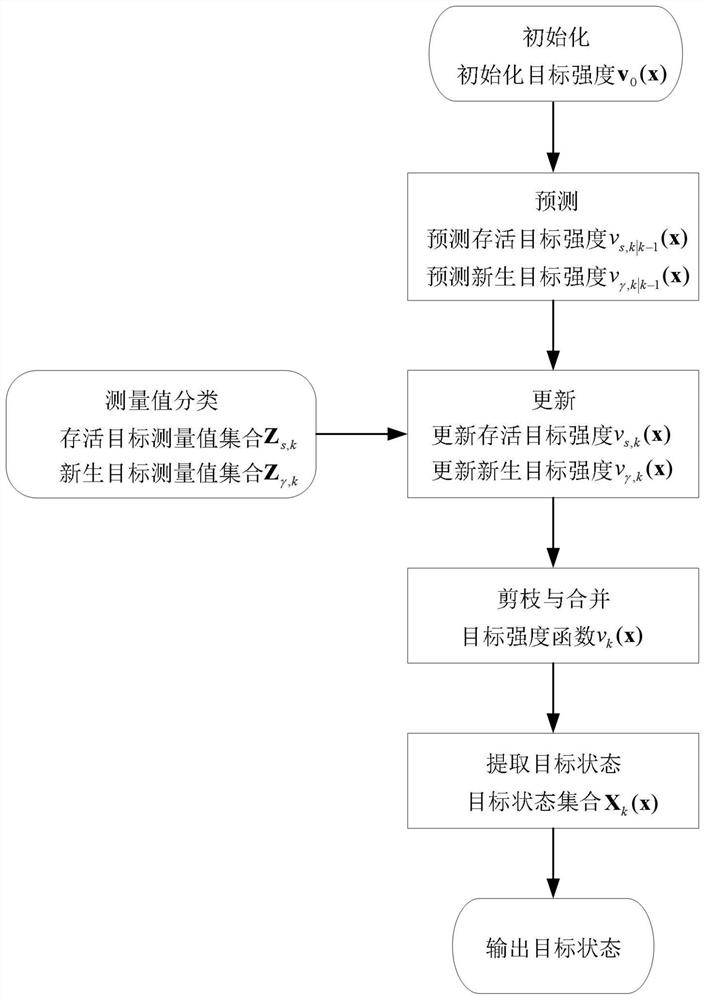
[0051] refer to figure 1 Shown, a kind of multi-target tracking method based on adaptive extended Kalman probability hypothesis density filter, described tracking method comprises the following steps:
[0052] Step 1. Initialize the new strength function v 0 (x);
[0053] Step 2, according to the newborn intensity function v 0 (x) predicted survival target strength function v s,k|k-1 (x) and the nascent target strength function v γ,k|k-1 (x);
[0054] Step...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More