

autonomous mobile device
A technology for autonomous movement and equipment, which is applied in cleaning equipment, automatic detection of obstacles, automatic control of traveling motion, etc. It can solve problems such as low sensing accuracy, and achieve the effect of improving sensing ability, quality and sensing accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
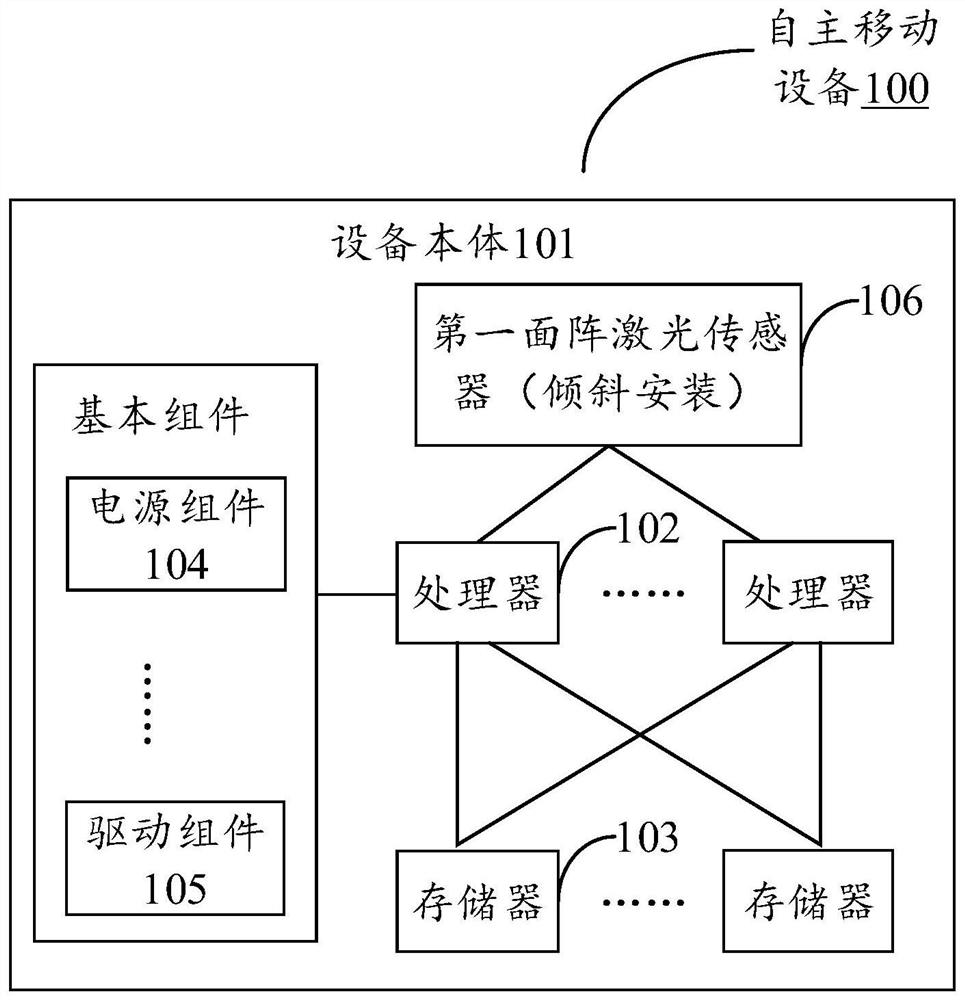
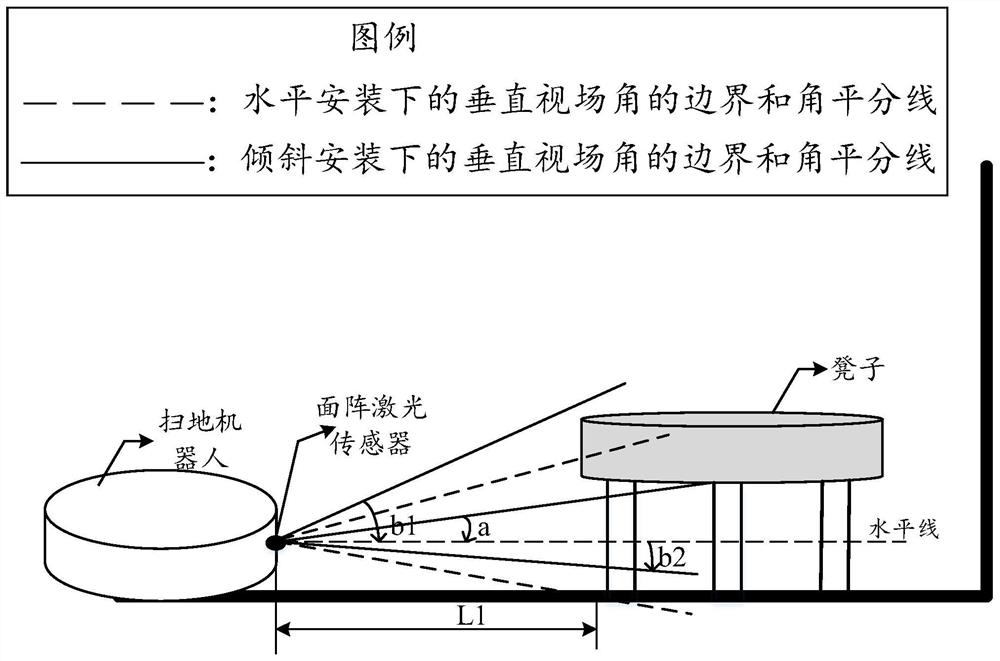
[0046]In the scenario-based embodiment 1, the autonomous mobile device is a sweeping robot, and an area array laser sensor is installed on the sweeping robot, and the area array laser sensor can collect environmental information within its horizontal field of view and vertical field of view. During the cleaning task of the sweeping robot, the area to be cleaned can be identified according to the environmental information collected by the area array laser sensor. Optionally, it is also possible to plan the path according to the environmental information collected by the area array laser sensor, and move to the area to be cleaned along the planned path, and in the process of moving to the area to be cleaned, according to the data collected by the area array laser sensor. The environmental information is used for obstacle recognition and obstacle avoidance. Alternatively, the sweeping robot can construct an environmental map based on the environmental information collected by the...
Embodiment 2
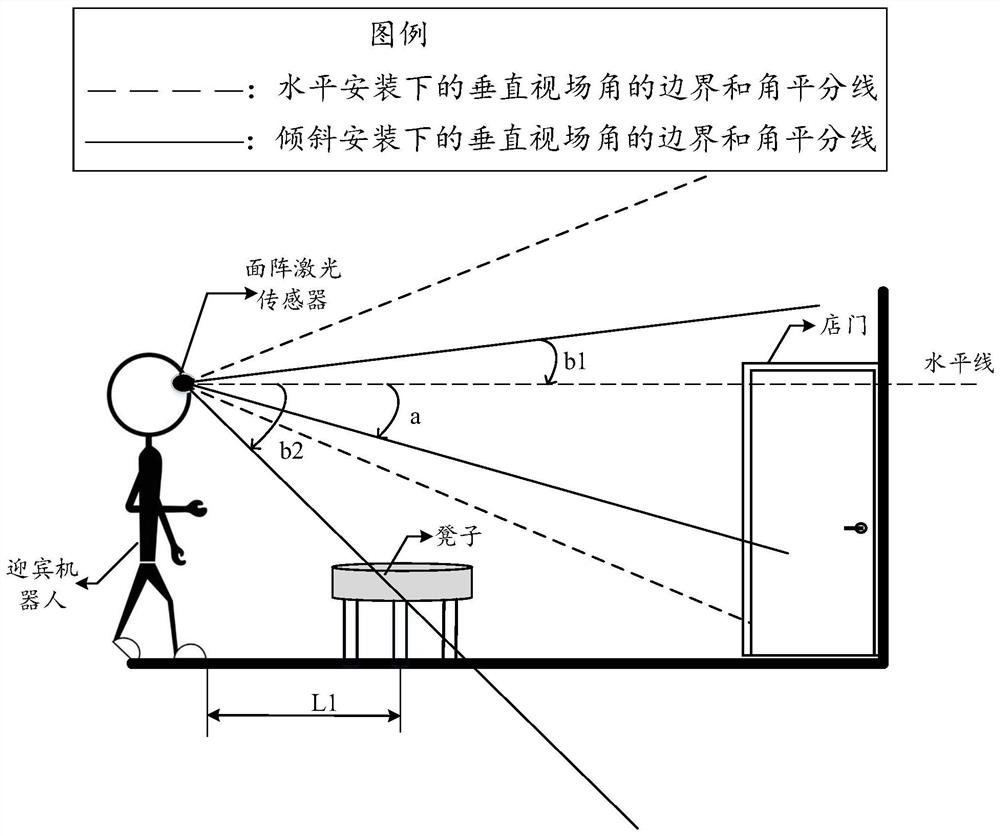
[0055] In the scenario-based embodiment 2, the autonomous mobile device is a welcome robot, and an area array laser sensor is installed on the welcome robot, and the area array laser sensor can collect environmental information within its horizontal and vertical field of view. In the process of welcoming guests, the welcome robot can identify users or customers who need to be received according to the environmental information collected by the area array laser sensor. Optionally, path planning can also be performed according to the environmental information collected by the area array laser sensor, and guide the user or customer to the corresponding area or location along the planned path, and in the process of guiding the user or customer to the corresponding area, Obstacle recognition and obstacle avoidance can also be performed according to the environmental information collected by the area array laser sensor.
[0056] Assume that the area array laser sensor is horizontall...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More