

Automatic driving intersection vehicle entering moment and driving track control method
A technology of driving trajectory and automatic driving, which is applied in the traffic control system of road vehicles, traffic control system, traffic flow detection, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
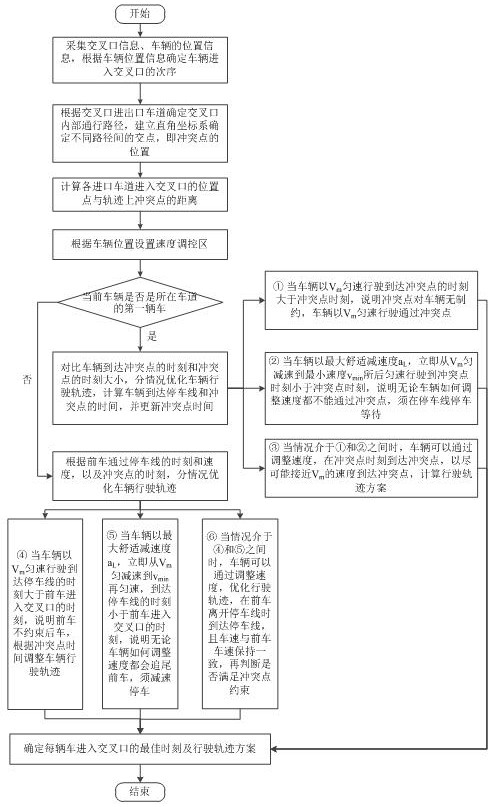
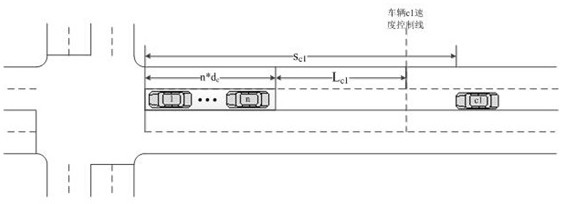
[0113] Step 1: Collect intersection information as the input condition of the control model, including the type and size of the intersection, the number of lanes of entrance and exit lanes in each direction, and lane width; collect vehicle information, including the current location of the vehicle to stop at the intersection line distance s c , where c represents the vehicle, c∈C, C represents the set of vehicles, the speed of the vehicle at the current moment, according to s c Sorting the order in which vehicles enter the intersection, the vehicles enter the intersection in order according to the first-come-first-served rule;
[0114] Step 2: Establish a Cartesian coordinate system at the intersection, determine the position point coordinates of the vehicle passing through the entrance road and the exit road, and establish an equation to describe the driving path of the vehicle inside the intersection according to the position point of the entrance road and the exit road. Th...
Embodiment 2
[0133] Said step 4 comprises the following steps:
[0134] Step 41: According to whether there is a vehicle ahead in the same lane, divide the vehicles into two categories. The first category, when there is no vehicle ahead in the same lane, that is, when the vehicle is the first vehicle in the current lane, only the time of the conflict point restricts the vehicle. When the time when the vehicle arrives at the conflict point is greater than or equal to the time of the conflict point, the vehicle can pass the conflict point smoothly, otherwise, the vehicle cannot pass the conflict point smoothly, and the vehicle needs to adjust the speed or stop and wait according to the time of the conflict point; the second type, on the same lane When there is a vehicle in front, it is necessary to consider the constraints of the vehicle in front and the conflict point when controlling the vehicle trajectory;
[0135] Step 42: For the case of no vehicle in front, that is, the vehicle is the ...
Embodiment 3
[0198] Said step 5 includes the following steps:
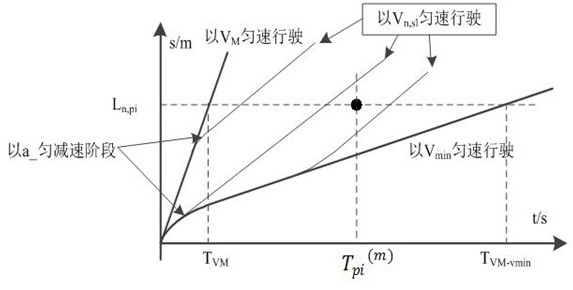
[0199] Step 51: For the situation of the vehicle in front, the vehicle in front restricts the vehicle behind. Since the vehicle does not change lanes in the speed control area, it is impossible for the vehicle behind to pass the vehicle in front and enter the intersection ahead of time, so first consider the vehicle in front to restrict the vehicle behind; Indicates that the nth car travels from the stop line to the conflict point p j The time of is calculated by formula (27):
[0200] (27)
[0201] when , it means that the moment when the n-1th vehicle arrives at the conflict point is greater than or equal to the time of the conflict point , the n-1th car can pass the conflict point smoothly. At this time, in order to improve the traffic efficiency and reduce the control delay, the nth car in the same lane should try to catch up with the n-1th car. When the rear of the car enters the traffic lane, it reaches the sto...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Length | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More