

A force-controlled end effector and an industrial robot
A technology of end effectors and actuators, which is applied in the direction of program-controlled manipulators, manipulators, manufacturing tools, etc., which can solve the problems of inability to achieve accurate tracking of contact force, single degree of freedom, and lack of multi-directional position adjustment capabilities to improve geometry. features, smooth motion, and reduced effects of singular poses
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The present invention will be more fully understood from the following detailed description, which should be read in conjunction with the accompanying drawings. Detailed embodiments of the present invention are disclosed herein; however, it is to be understood that the disclosed embodiments are merely exemplary of the invention, which may be embodied in various forms. Therefore, specific functional details disclosed herein are not to be interpreted as limiting, but merely as a basis for the claims and for teaching one skilled in the art to vary in virtually any suitable detailed embodiment. The manner adopts the representative basis of the present invention.
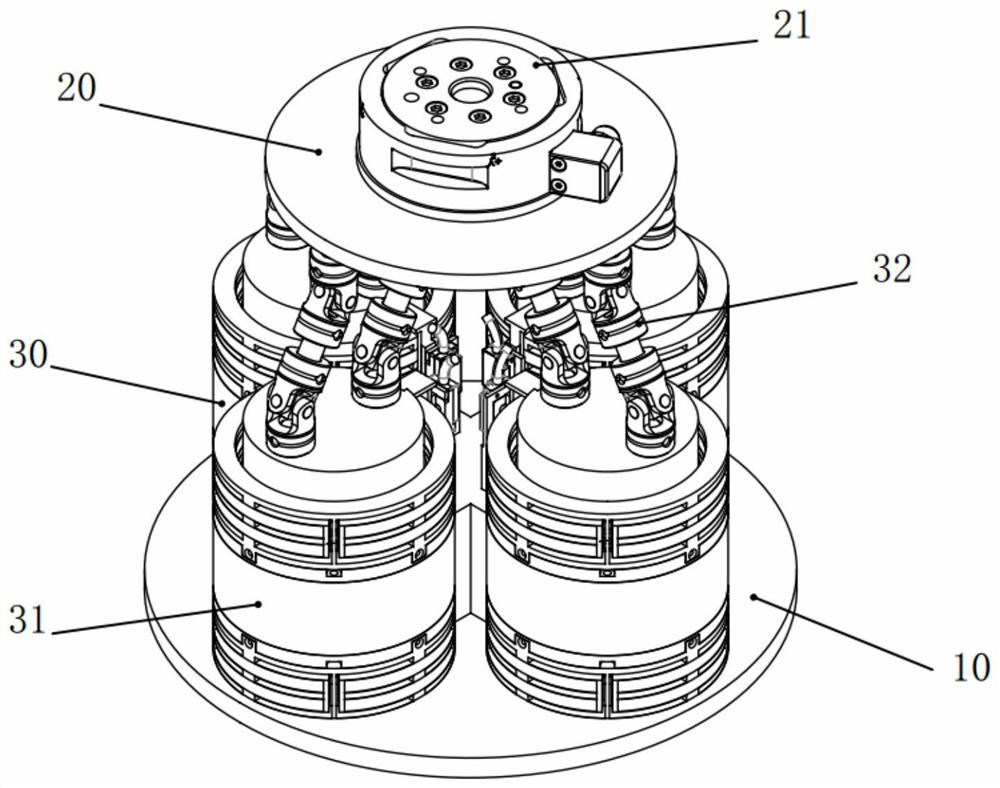
[0032] like figure 1 As shown in the figure, a force-controlled end effector disclosed in the embodiment of the present invention is connected with a controller (not shown in the figure), and under the action of the control force signal output by the controller, the entire force-controlled end effector and the wo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More