

A Trajectory Prediction Method for Unmanned Vehicles Based on Local Attention Mechanism
A trajectory prediction, unmanned vehicle technology, applied in prediction, neural learning methods, computer parts and other directions, can solve the problem of insufficient excavation of the interaction between surrounding vehicles and unmanned workshops, rough historical trajectory information, low trajectory prediction accuracy, etc. question
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042]
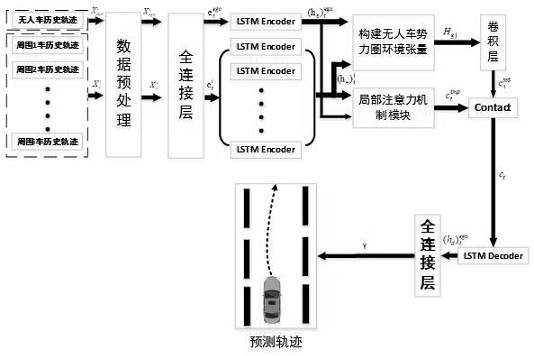
[0043] Among them, the encoder of the LSTM model is responsible for encoding the trajectory information of each vehicle into the hidden state.
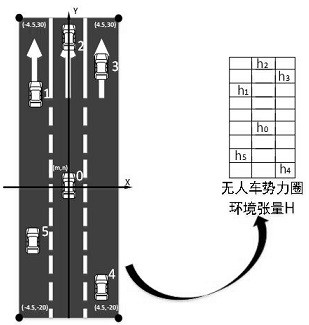
[0048] Input the historical trajectories of all vehicles around the unmanned vehicle into the encoder of the LSTM model, based on the unmanned vehicle cycle at time t.
[0049] The encoded hidden state vectors of all surrounding vehicles at the current time t are changed linearly.
[0050]
[0051] Among them, , is the weight matrix learned through backpropagation.
[0058]
[0061] Compare the hidden state vector of the i-th vehicle around the window at time t, one by one with the hidden state vector of the unmanned vehicle at time t.
[0062]
[0065]
[0067]
[0073]
[0075]
[0079].
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More