

A self-tuning method for a fully automatic control motor for a vehicle
A fully automatic and self-adjusting technology, applied in multiple motor speed/torque control, motor, control driving and other directions, which can solve the problems of large randomness and inaccuracy in adjusting attitude.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0064] The present invention will be further described below in conjunction with the accompanying drawings, but the protection scope of the present invention is not limited to the following description.
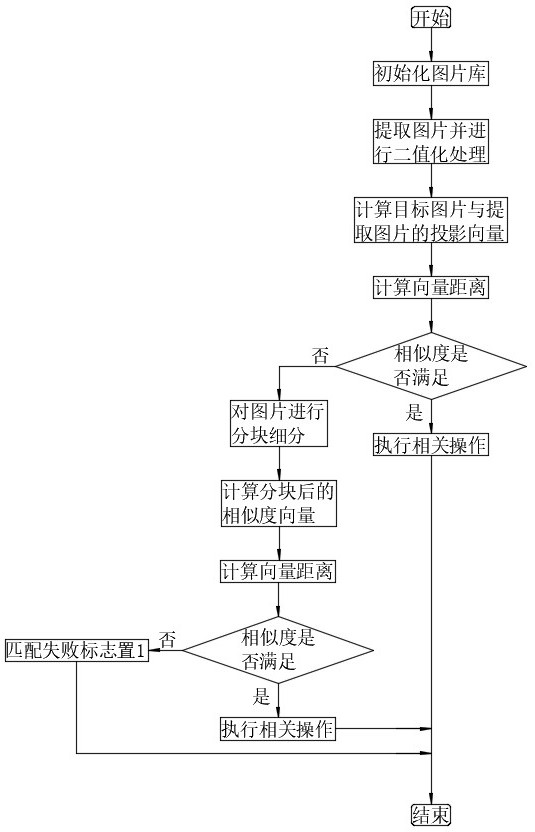
[0065] Such as Figure 1~Figure 4 As shown, a self-tuning method for a fully automatic control motor of a vehicle:
[0066] S1. Use the attitude angle sensor to measure the angle of the vehicle body, and then adjust it;
[0067] S2. It uses a two-dimensional fuzzy control algorithm to determine the rotational speed of the Mecanum wheel. The specific method is as follows:
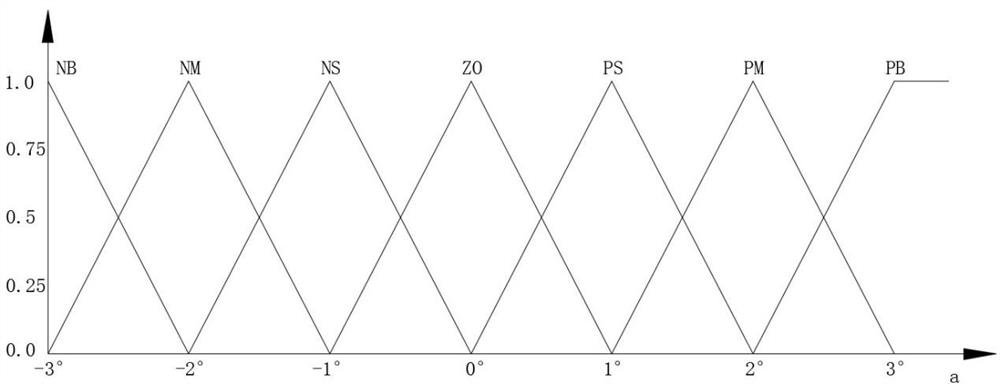
[0068] S21, setting two input variables A, Ac and one output variable U;
[0069] Among them, A: a—the angle error of the body, the unit is °;
[0070] A is a function of the vehicle body angle error, and a is a specific function value of the function;
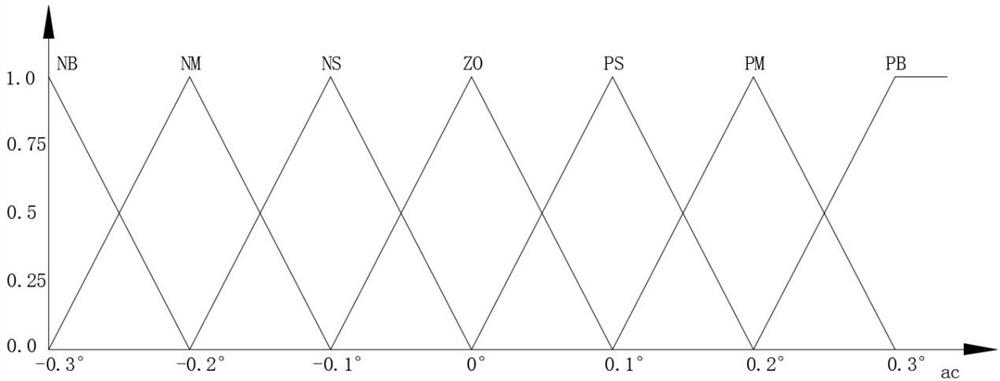
[0071] A c :a c —The error value of the two angles of the body, the unit is °;
[0072] A c is a function of body angle error, a c is a concrete f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More