

Multi-unmanned aerial vehicle path planning method
A path planning and multi-UAV technology, applied in the field of UAVs, can solve the problems of inability to obtain flight time path planning results, difficult task assignment results, and low algorithm efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0041] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments.
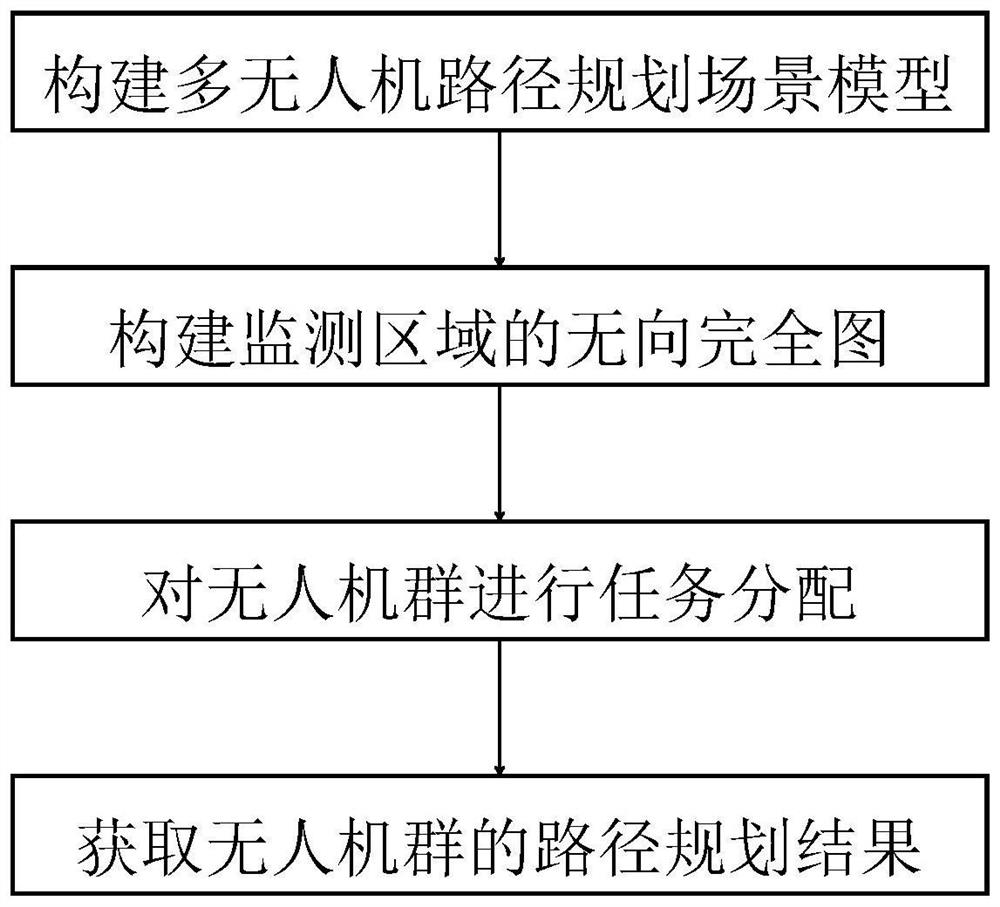
[0042] refer to figure 1 , the present invention comprises the following steps:
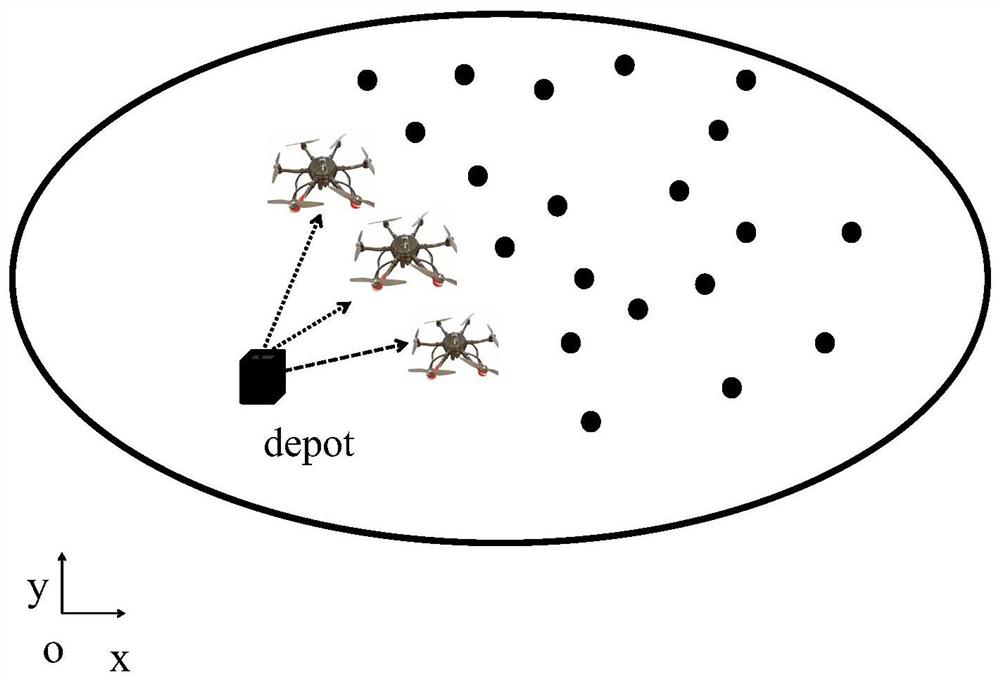
[0043] Step 1) Construct multi-UAV path planning scene model:
[0044] Construction includes the monitoring area distributed in the three-dimensional rectangular coordinate system xoy plane and the drone group A={A in the space of the three-dimensional rectangular coordinate system i |1≤i≤M} multi-UAV path planning scene model, its structure is as follows figure 2 As shown, the monitoring area includes the starting point depot of UAV A and N monitoring points V={n j |1≤j≤N}, where M represents the number of drones, M≥2, A i Indicates the flight altitude is H i The i-th UAV, n j Indicates that the position coordinates are (x j ,y j ), N≥M, M=3, N=20 in this embodiment.
[0045] Step 2) Construct an undirected complete graph of the monitoring are...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More