

Cluster unmanned aerial vehicle grouping assignment method and system, controller, medium and terminal
A technology of unmanned aerial vehicle and controller, applied in non-electric variable control, control/regulation system, three-dimensional position/channel control and other directions, can solve the problem that the cluster unmanned aerial vehicle cannot be grouped for calculation, and cannot realize grouped calculation and grouped assignment. The calculation process is cumbersome and other problems, and the group assignment process is simple and easy, the overall path change time is shortened, and the flight safety is increased.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
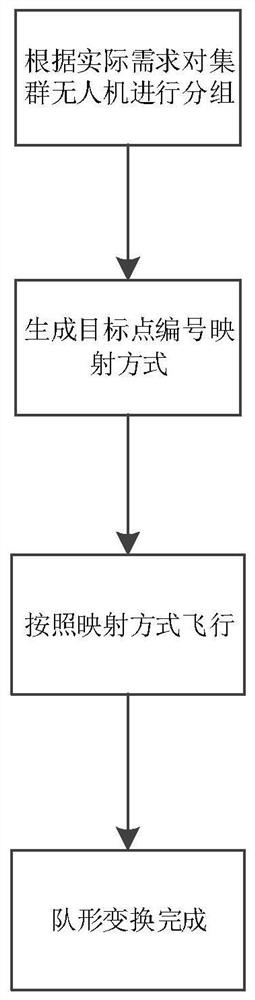
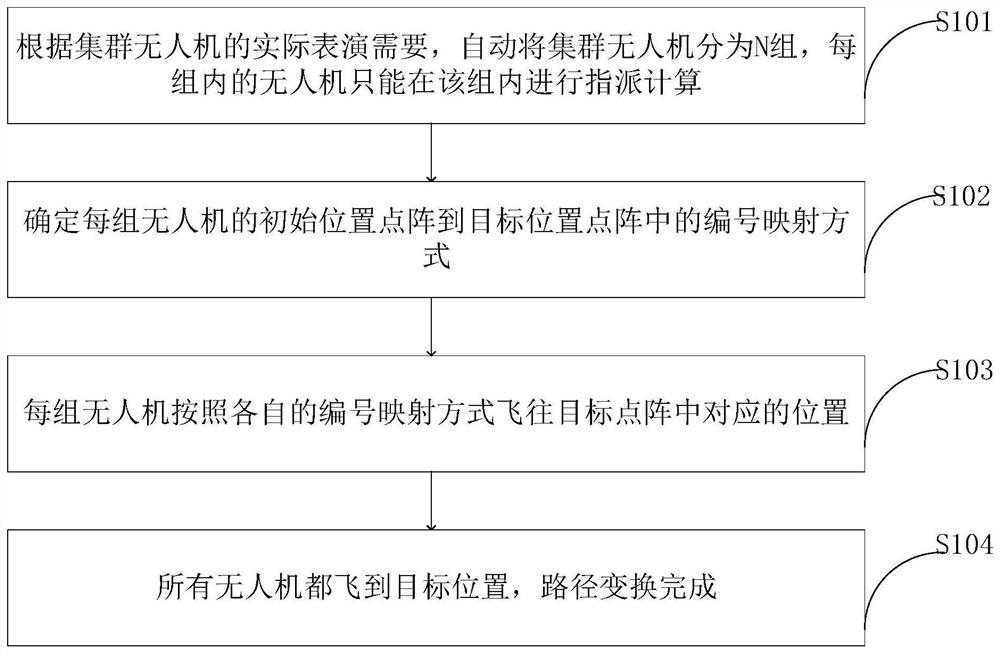
[0052] A cluster unmanned aerial vehicle group assignment method, it comprises the following specific steps:
[0053] Step 1: According to the actual performance needs of the cluster drones, automatically divide the cluster drones into N groups, and the drones in each group can only perform assignment calculations in this group.
[0054] Step 2: Determine the initial position lattice L of each group of drones 1 To the target position lattice L 2 The number mapping method in . That is, the target lattice L is randomly exchanged 2 The positions of the two elements in , calculate the path sum of all UAVs after the exchange, and compare it with the path sum of all UAVs before the exchange. If the path sum decreases, the random exchange is accepted.
[0055] Step 3: Each group of UAVs flies to the target lattice L according to their respective number mapping methods 2 corresponding position in .
[0056] Step 4: All UAVs fly to the target position, and the path transformation ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More