

Cluster unmanned aerial vehicle path assignment method, control system, storage medium and unmanned aerial vehicle
A UAV and path technology, applied in control/adjustment system, vehicle position/route/height control, non-electric variable control, etc. Long time and other problems, the situation of avoidance of path crossing is reduced, the overall path change time is shortened, and the effect of increasing flight safety is achieved.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the examples. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
[0044] Aiming at the problems existing in the prior art, the present invention provides a route assignment method, control system, storage medium and unmanned aerial vehicles for clustered UAVs. The present invention will be described in detail below with reference to the accompanying drawings.
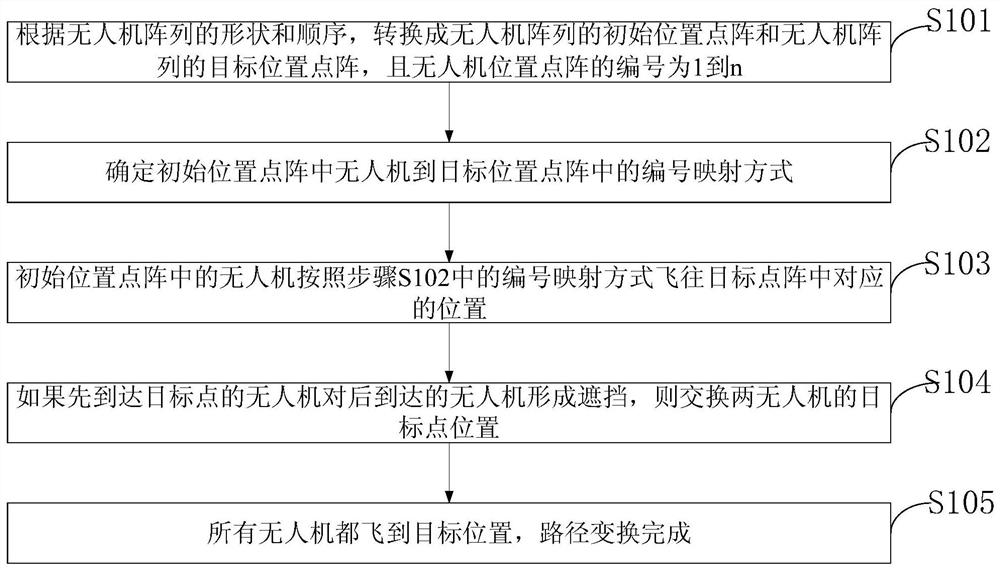
[0045] Such as figure 1 As shown, the cluster UAV path assignment method provided by the embodiment of the present invention includes the following specific steps:
[0046] S101: According to the shape and order of the UAV array, convert to the initial position lattice L of the UAV array 1 and the target location lattice L of the UA...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More