

Flight control method and system for triple-redundancy IMU
A triple-redundancy, flight control technology, applied in the field of aircraft control, can solve problems such as the inability to obtain attitude feedback, no solution proposed, and the failure of UAVs to fly normally.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0027] According to an embodiment of the present invention, an embodiment of a flight control method of a triple-redundant IMU is provided. It should be noted that the steps shown in the flow chart of the accompanying drawings can be implemented in a computer system such as a set of computer-executable instructions and, although a logical order is shown in the flowcharts, in some cases the steps shown or described may be performed in an order different from that shown or described herein.
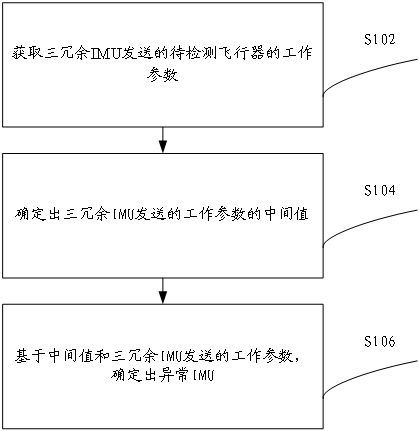
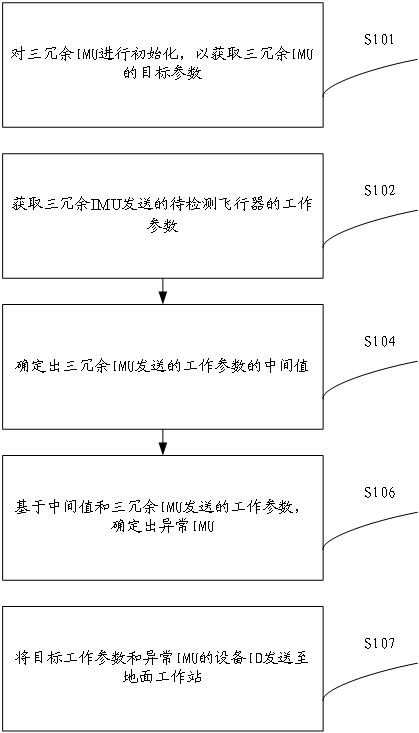
[0028] figure 1 It is a flow chart of a flight control method of a triple redundant IMU according to an embodiment of the present invention, such as figure 1 As shown, the method includes the following steps:
[0029] Step S102, obtaining the working parameters of the aircraft to be detected sent by the three-redundant IMU, wherein the working parameters include at least one of the following: three-axis gyroscope parameters, three-axis acceleration parameters and temperature parameters, an...
Embodiment 2
[0051] The embodiment of the present invention also provides a three-redundant IMU flight control system, the three-redundant IMU flight control system is used to execute the three-redundant IMU flight control method provided by the above content of the embodiment of the present invention, as follows The specific introduction of the flight control system with three redundant IMUs provided by the embodiment of the present invention.
[0052] Such as image 3 as shown, image 3 It is a schematic diagram of the flight control system of the above-mentioned three redundant IMUs, the flight control system of the three redundant IMUs includes: three redundant IMU10, a bus 20 and a controller 30, wherein the bus is connected to the three redundant IMUs and the controller 30 respectively. the controller is connected;
[0053] The three-redundant IMU10 is used to collect the working parameters of the aircraft to be detected, wherein the working parameters include at least one of the f...
Embodiment 3
[0062] An embodiment of the present invention also provides a computer-readable storage medium, on which a computer program is stored, and when the computer program is run by a processor, the steps of the method described in the first embodiment above are executed.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More