

Wearable mountaineering power-assisted robot and power-assisted control method thereof
A wearable and robotic technology, applied in mountaineering equipment, program-controlled manipulators, manipulators, etc., can solve the problems of unchangeable power assist value, human burden, and low power assist value, etc. Comfortable booster experience, solving the effect of booster lag
Active Publication Date: 2021-04-20
浙大宁波理工学院
View PDF8 Cites 2 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
[0007] (1) The existing mountaineering assisting devices mainly play the role of mountaineering assisting through passive mechanisms (torsion springs, elastic ribbons, and magnet repulsion) through energy storage and release. Although the mechanism is relatively simple, the assisting value is not large, and it is difficult to achieve To achieve an obvious boosting effect, and the energy storage process must be done when the human body’s lower limb joint muscle strength exercises do negative work, if the timing of triggering energy storage is not right, it will easily cause additional burden on the human body
[0008] (2) Existing research experiments at home and abroad have shown that when the general mountaineering assisting device provides a joint torque within 30% of the human body's own force, it can provide a boosting effect without affecting the human body's gait. Obvious impact, resulting in poor assist experience
The design form of the existing power assist mechanism leads to the inability to change the power assist value during the assist process, which makes it poorly adaptable to different people and different mountaineering terrains. Single form of assistance, the effect is greatly reduced
[0009] (3) The existing schemes do not clearly involve the timing of mountaineering assistance and the timing of energy storage, and the method of assisting control lacks a clear plan, so it is difficult to evaluate the effect of mountaineering assistance
[0010] (4) The existing solution only plays a certain role in assisting the lower limb joints during mountain climbing, but there is no effective solution for joint buffer protection when going down the mountain
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
Embodiment approach
[0087] Finally, the present invention provides a wearable climbing power-assisted robot and its power-assisted control method. The active drive joint of the wearable mechanical exoskeleton can also be driven by a motor with a ball screw or a pneumatic drive or a hydraulic drive. The motor is driven by a ball screw link or pneumatically or hydraulically to realize the flexion and extension movement of the thigh rod of the power-assisted robot around the hip joint. For example, as the third embodiment of the present invention, such as Figure 9 As shown, the active drive joints of the wearable mechanical exoskeleton in this embodiment adopt a hydraulic drive structure.
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
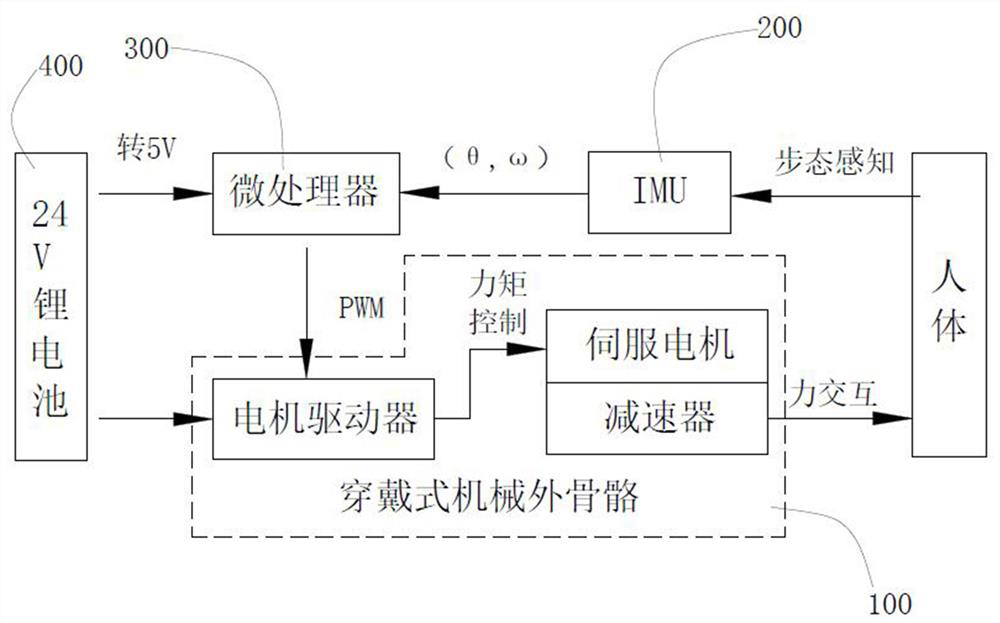
The invention relates to a wearable power-assisted robot, in particular to a wearable mountaineering power-assisted robot which comprises a wearable mechanical exoskeleton, wherein in each gait period, hip joints on the same side of the wearable mechanical exoskeleton actively output buckling direction power-assisted torque and hip joints on the different sides of the wearable mechanical exoskeleton synchronously and actively output stretching direction power-assisted torque; an inertia measurement unit used for measuring hip joint angle values and angular speed values of the two legs of the human body in each gait period; and a microprocessor used for obtaining a walking phase angle according to a feedback value of the inertia measurement unit in each gait period, so that a function relationship between the walking phase angle and a parameterized assistance curve is obtained by establishing a mapping model, and then the microprocessor outputs a PWM driving signal to control the hip joints of the wearable mechanical exoskeleton to actively output an assisting torque corresponding to the parameterized assistance curve. Meanwhile, the invention further designs a power-assisted control method. The technical problem of mountain climbing assistance online adjustment is solved, and mountain climbing assistance experience is optimized.
Description
technical field [0001] The invention relates to a wearable power-assisted robot, in particular to a wearable mountain-climbing power-assisted robot, and a power-assisted control method of the wearable mountain-climbing power-assisted robot. Background technique [0002] With the development of mountaineering tourism, there are more and more auxiliary equipment for mountaineering. The main purpose is to help passengers reduce excessive physical exertion during mountaineering, reduce the loss of lower limb joints, and improve the overall experience of mountaineering and enjoying the scenery. [0003] For example, a four-action system mountaineering auxiliary belt recorded in the Chinese invention patent application document with application number CN201810679111. Belts and right shoulder straps are fixed with buckles at the front and bottom, and the buckles are used to connect the biceps femoris support strap; the upper back of the left shoulder strap and the right shoulder st...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More Patent Type & AuthorityApplications(China)
IPC IPC(8): A63B29/02A63B71/06A63B71/12B25J9/00B25J9/16
Inventor杨巍刘晓广谷海燕徐铃辉杨一帆余林繁杨灿军
Owner浙大宁波理工学院