

GNSS/SINS/magnetometer combination method based on smooth variable structure filtering
A combined method and variable structure technology, applied in navigation calculation tools, radio wave measurement systems, navigation through speed/acceleration measurement, etc. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0094] Below according to accompanying drawing, the present invention will be further described
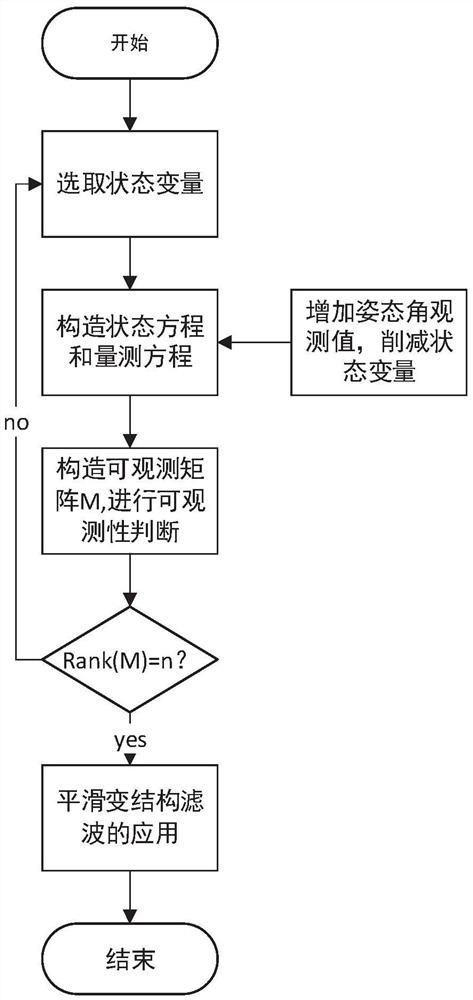
[0095] Such as figure 1 Shown, the specific implementation steps of the present invention are as follows:
[0096] Step 1: According to actual needs, select appropriate navigation parameters, and the present invention selects the inertial navigation speed error [δV E δV N δV U ], attitude angle error [φ E φ N φ U ] and inertial navigation position error [δL δλ δh] as state variables:
[0097] X=[δV E δV N δV U φ E φ N φ U δL δλ δh]
[0098] Step 2: Design the state equation. In order to meet the constraints of SVSF, the traditional 15-dimensional filter is reduced to 9 dimensions, and the remaining 6 dimensions are treated as equivalent system white noise. The specific formula of the system equation is
[0099]
[0100] in,
[0101]
[0102]
[0103]
[0104]
[0105] In the above formula, F is the state transition matrix, G is the syste...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More