Friction nonlinearity self-adaptive control method for a servo system
A technology of self-adaptive control and self-adaptive controller, applied in the fields of friction nonlinear control and servo-servo control, can solve problems such as poor control performance, reduce complexity and prove stability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
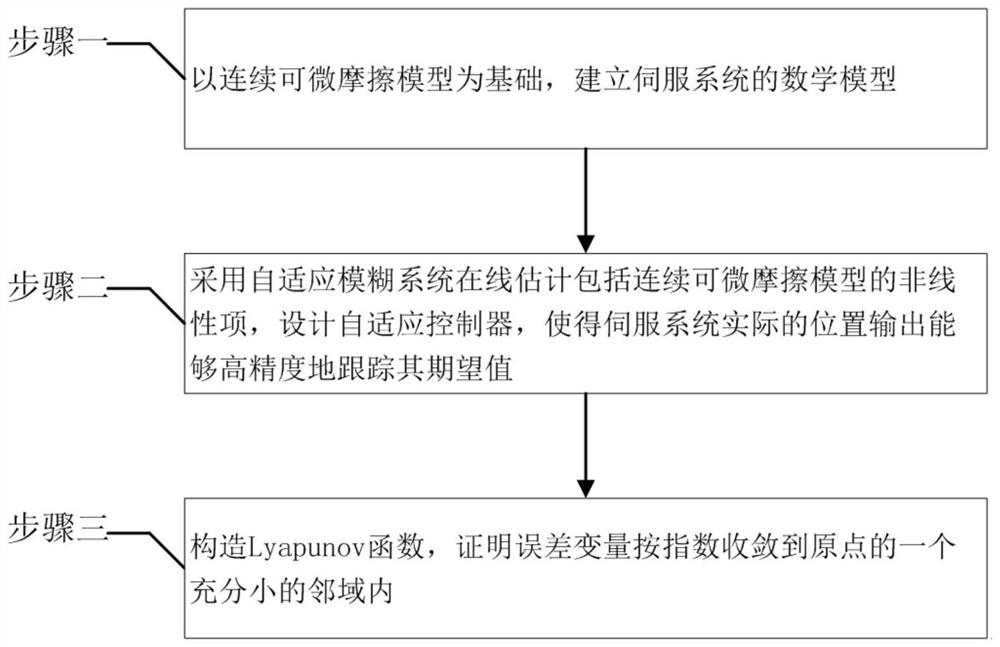
[0017] The present invention proposes a friction nonlinear adaptive control method of a servo system, comprising the following steps:
[0018] Step 1: Using the continuous differentiable friction model F f (ω) as the basis, establish the mathematical model of the servo system;
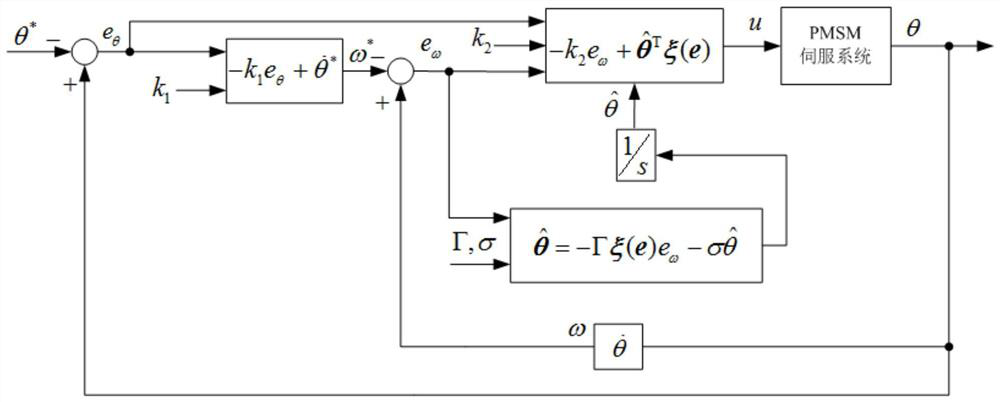
[0019] Step 2: Adopt adaptive fuzzy system θ *T ξ(e) is estimated online including the nonlinear term f of the continuous differentiable friction model, and an adaptive controller is designed so that the actual position output θ of the servo system can track its expected value θ with high precision * ;
[0020] Step 3: Construct the Lyapunov function V, and prove that the error variable e=[e θ ,e ω ] T converges exponentially to a sufficiently small neighborhood of the origin.
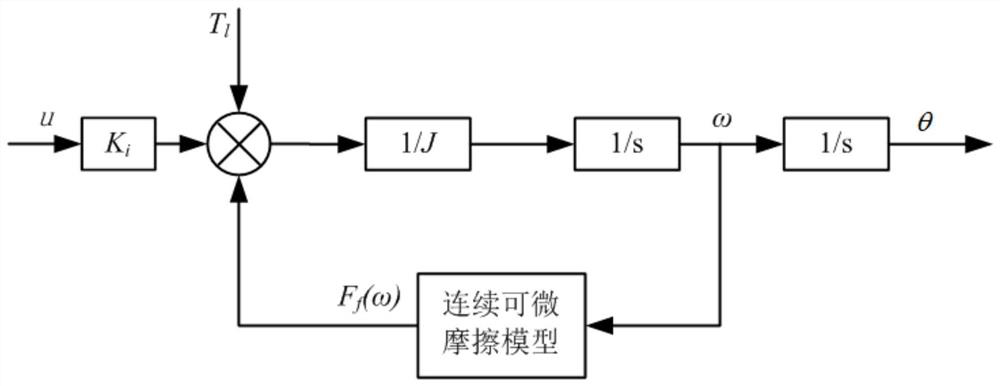
[0021] Further, in the first step, the continuous differentiable friction model F f (ω) as the basis, the process of establishing the state equation model of the servo system is:
[0022] The dynamic equation of the ele...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap