

System for avoiding unexpected steering and control method thereof
An undesired and controller technology, which is applied in the system and control field to avoid undesired steering, can solve the problems of inability to ensure accurate communication of steering request signals, reduce vehicle speed, limit steering angle requests, etc., and achieve reliable design performance requirements and ensure communication , the effect of avoiding undesired steering hazards
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0052] According to Embodiment 1, a system for avoiding undesired steering is provided, including:
[0053] The control module is used to obtain the external information of the driving vehicle and transmit the information;
[0054] A software handling policy module for defining undesired diversion hazards;
[0055] The functional safety concept export module is used to diagnose whether the lane information is covered according to the external information of the driving vehicle;
[0056] Software policy module for analysis of vehicle functional safety.
Embodiment 2
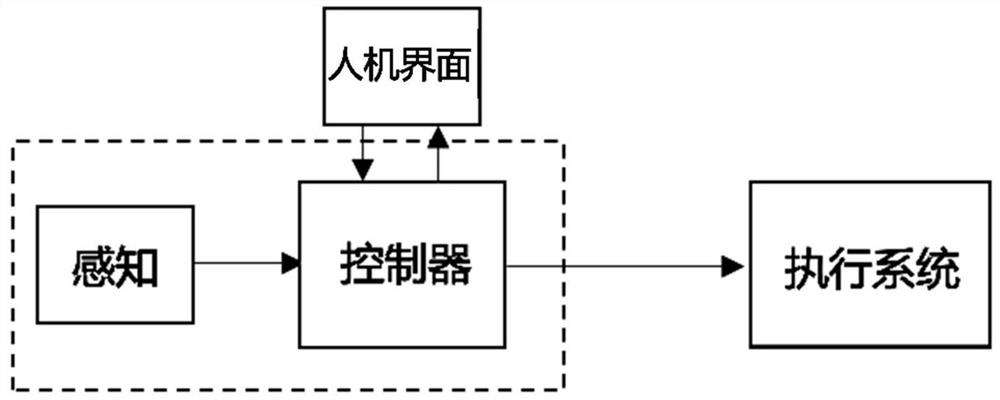
[0058] On the basis of Embodiment 1, the control module includes a perception module, a controller, a man-machine interface and an execution system, wherein,
[0059] The perception module collects information on the external environment of the driving vehicle through multiple sensors, and then transmits the collected signal to the controller; the controller transmits control information to the man-machine interface by acquiring the perception information; the man-machine interface performs Interaction and exchange of information, and then receive the information transmitted by the controller, convert the information through the man-machine interface, and then feed back the instructions to the controller, and the man-machine interface sends execution commands to the execution system through the controller, and then adjusts the vehicle according to the environment. Driving route.
Embodiment 3
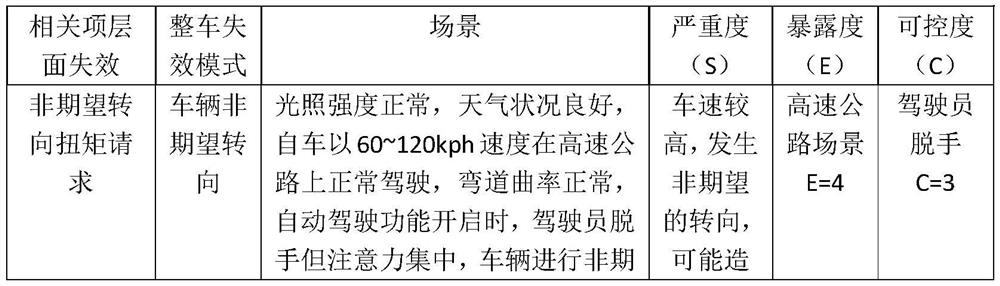
[0061] On the basis of Embodiment 1, the software processing strategy module includes scenario analysis and safety diagnosis, wherein the scenario analysis includes related item-level failure, vehicle failure mode, scenario, severity, exposure and controllability;
[0062] The failure at the related item level indicates an unexpected steering torque request; the vehicle failure mode indicates an unexpected steering of the vehicle; the scene is composed of normal light intensity and good weather conditions, and the vehicle is driving normally on the expressway at a speed of 60-120kph , the curvature of the curve is normal, and when the automatic driving function is turned on, the driver releases his hands but concentrates, and the vehicle performs an unexpected steering formation; The exposure degree above represents the highway scene; the controllability degree represents the driver's hands-off level; the scene analysis is as follows:
[0063]
[0064]
[0065] The safet...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More