

Gait control method of under-actuated biped walking robot
A technology of walking robot and gait control, which is applied in the direction of adaptive control, general control system, control/regulation system, etc., and can solve the problem of lack of robot walking control scheme
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
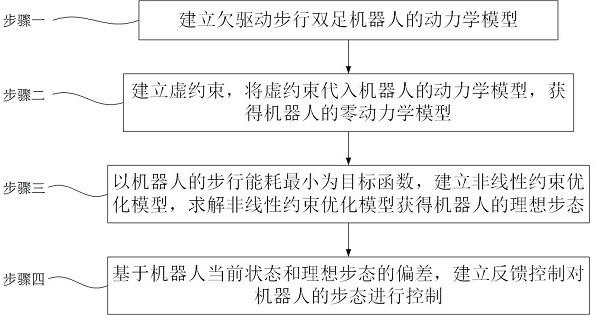
[0037] A gait control method of underwinding bipple footing robots, such as figure 1 As shown, including the following steps: Step 1, establish the kinetic model of the underflapped footer robot:
[0038]
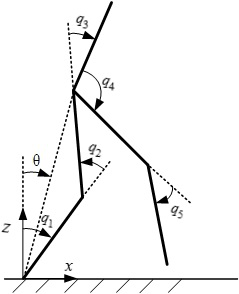
[0039] This embodiment is suitable for figure 2 Double-foot robotic, where Q = [q 1 , Q 2 , Q 3 , Q 4 , Q 5 ] T For robotic joint degrees, Q 1 In order to support the angle of the leg calf and the vertical direction, it is the freedom of driving, Q 2 To support leg knee joint angles, Q 3 Is the angle between the torso and the vertical direction, Q 4 Q q,, 角 角 5 In order to swing the legs of the leg, D is the robot inertia matrix, To the coupling matrix, B is a constant matrix, u is the joint input torque. In this embodiment, the robot thigh and the calf length is 0.275m, and the mass is 0.875kg, the body is 0.15m wide, the trunk is 0.1m long, and the mass is 5.5 kg.
[0040] Step II. Establish virtual constraints, to substitute virtual constraints into robots, obtain zero-dy...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More