

Excavator operation track planning method and device
A trajectory planning, excavator technology, applied in two-dimensional position/channel control, vehicle position/route/height control, non-electric variable control and other directions, can solve the problems of complex calculation and high computing power requirements, and achieve fast computing speed , Algorithm efficient effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] In order to make the purpose, technical solutions and advantages of the present invention clearer, the technical solutions in the present invention will be clearly and completely described below in conjunction with the accompanying drawings in the present invention. Obviously, the described embodiments are part of the embodiments of the present invention , but not all examples. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present invention.
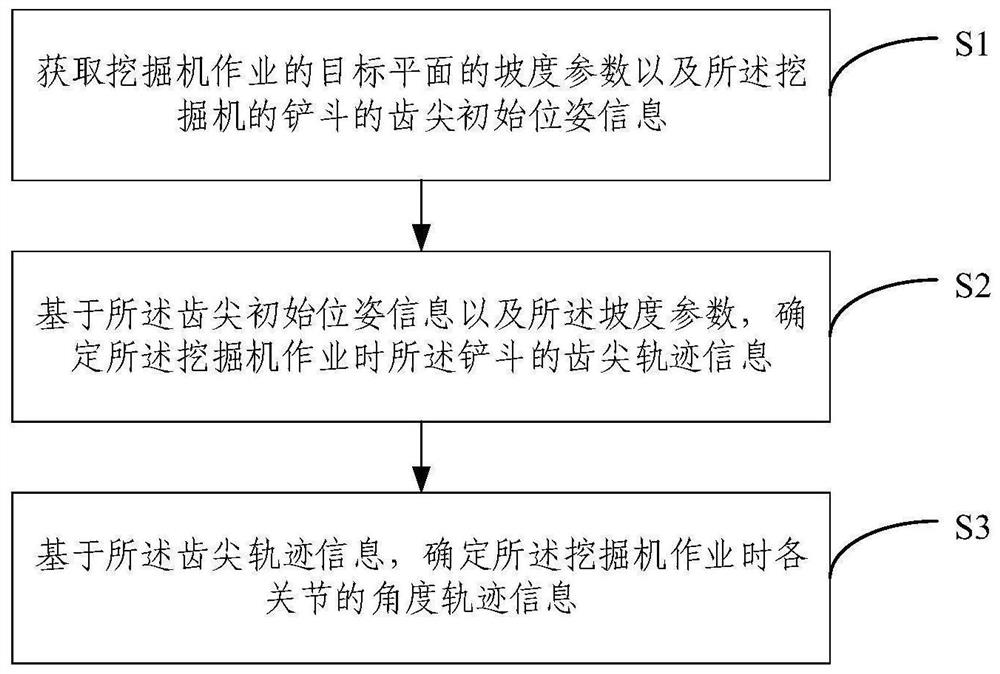
[0042] Such as figure 1 As shown, an excavator operation trajectory planning method is provided in an embodiment of the present invention, including:
[0043] S1, obtaining the slope parameter of the target plane of the excavator operation and the initial pose information of the tooth tip of the bucket of the excavator;
[0044] S2. Based on the tooth tip initial pose information and the sl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More