Land-air dual-purpose unmanned aerial vehicle with stair climbing and jumping functions and operation method of land-air dual-purpose unmanned aerial vehicle
A dual-use technology for drones, land and air, applied in the field of drones, can solve problems such as large limitations, inability to stabilize, and inability to apply to various occasions, and achieve the effect of enhancing stability and increasing wind resistance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The present invention will be further described below in conjunction with accompanying drawing.
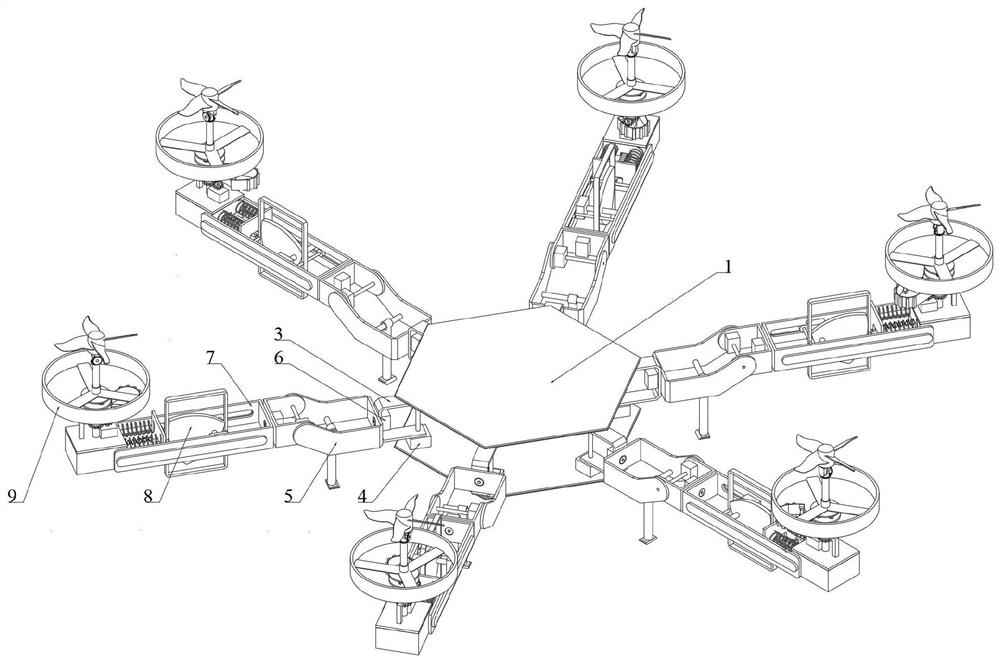
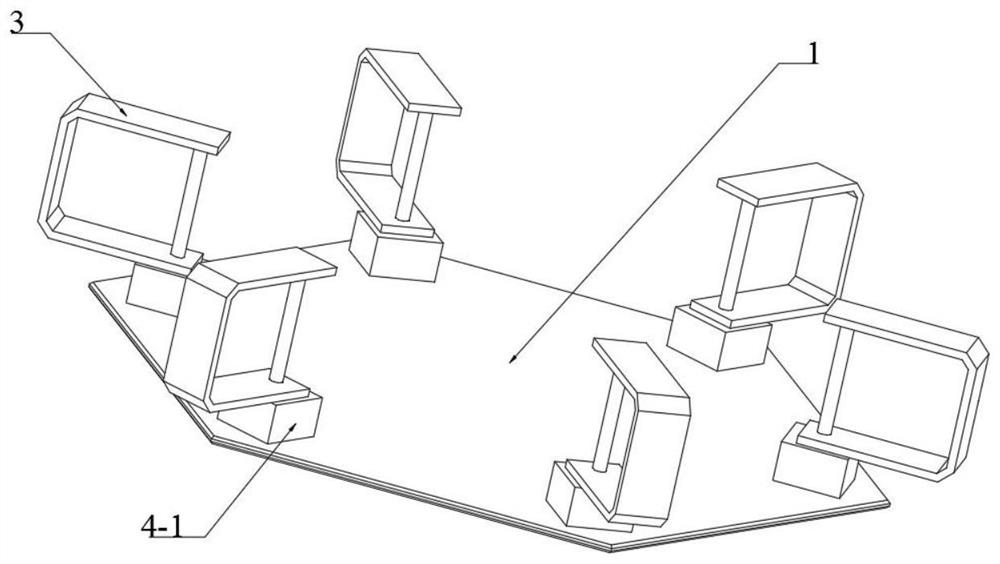
[0042] like figure 1 , 2 As shown, a road-air dual-purpose UAV with the functions of climbing stairs and jumping includes a body, a deformable arm, a controller and a wireless module. Described controller adopts the microcontroller board that model is arduino2560. Both the controller and the wireless module are installed in the body 1 . The inner ends of the six deformed arms are installed on the edge of the body 1 and are uniformly distributed along the circumference of the body 1 .
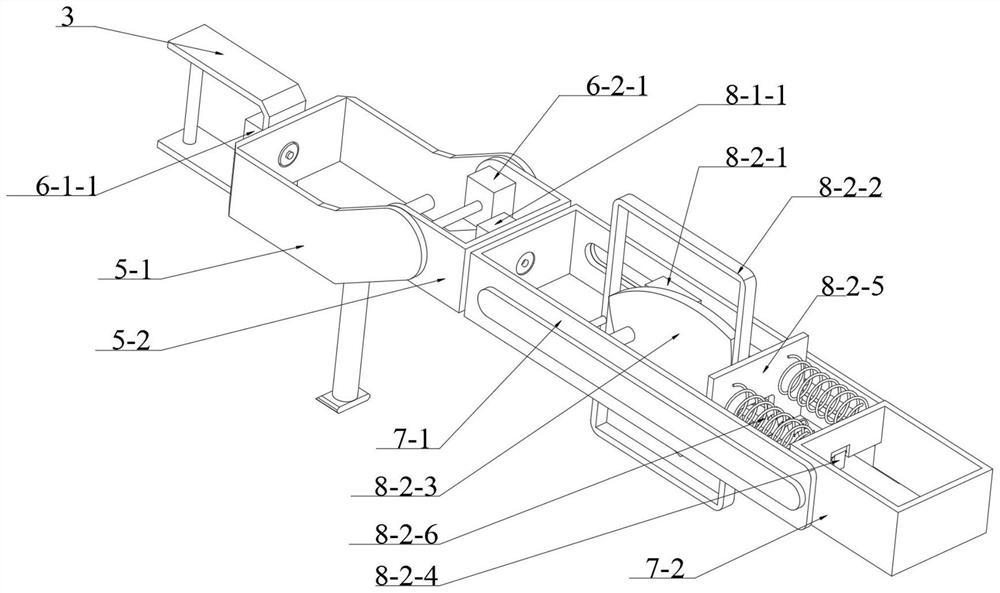
[0043] like figure 1 , 3 As shown in and 4, the deformed support arm 2 includes an inner arm 3, an inner arm drive assembly 4, a middle arm assembly 5, a middle arm drive assembly 6, an outer arm 7, an outer arm drive assembly 8 and an amphibious power assembly 9 . The edge of the inner arm 3 and the body 1 constitutes a first rotating pair. The middle arm assembly 5 includes a first ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com