Method and device for compensating deflection of cantilever crane and method and device for controlling cantilever crane
A boom and joint angle technology, applied in the field of deflection compensation, can solve the problem that the end of the boom cannot accurately reach the position of the target cloth point
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] Specific embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings. It should be understood that the specific embodiments described here are only used to illustrate and explain the present invention, and are not intended to limit the present invention.
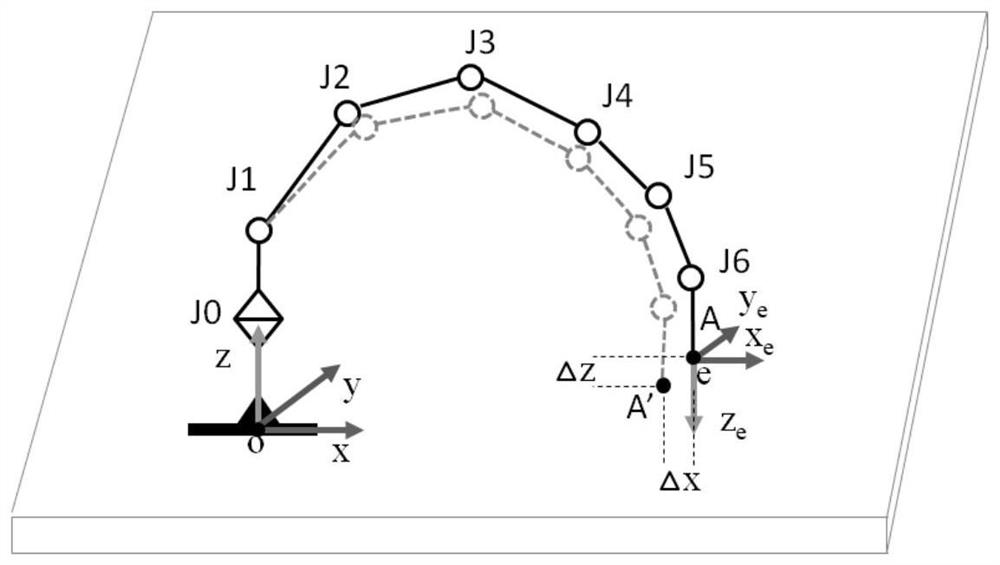
[0050] Taking the 7-DOF jib as an example, its structure is as follows figure 1 As shown, the jib can move 7 joints, J0-J6. Let A be the position where the end of the boom is expected to reach, for example, the desired cloth point, that is, the point e at which the end of the boom is expected to reach figure 1 Point A shown in . If the jib is rigid, a set of joint angles corresponding to the end e of the jib reaching point A can be calculated according to its inverse motion model. Assume that the arm frame configuration corresponding to the set of joint angles obtained is as follows: figure 1 Shown by the black solid line. Due to the elastic deformation of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More