UWB/INS fusion positioning method based on dynamic robust volume Kalman
A UWB-INS and fusion positioning technology, which is applied to combustion engines, internal combustion piston engines, and navigation through speed/acceleration measurement, can solve problems such as the influence of fusion positioning systems without considering the uncertainty of motion models
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] Next, the technical solutions in the embodiments of the present invention will be apparent from the embodiment of the present invention, and it is clearly described, and it is understood that the described embodiments are merely embodiments of the present invention, not all of the embodiments. Based on the embodiments of the present invention, there are all other embodiments obtained without making creative labor without making creative labor premises.
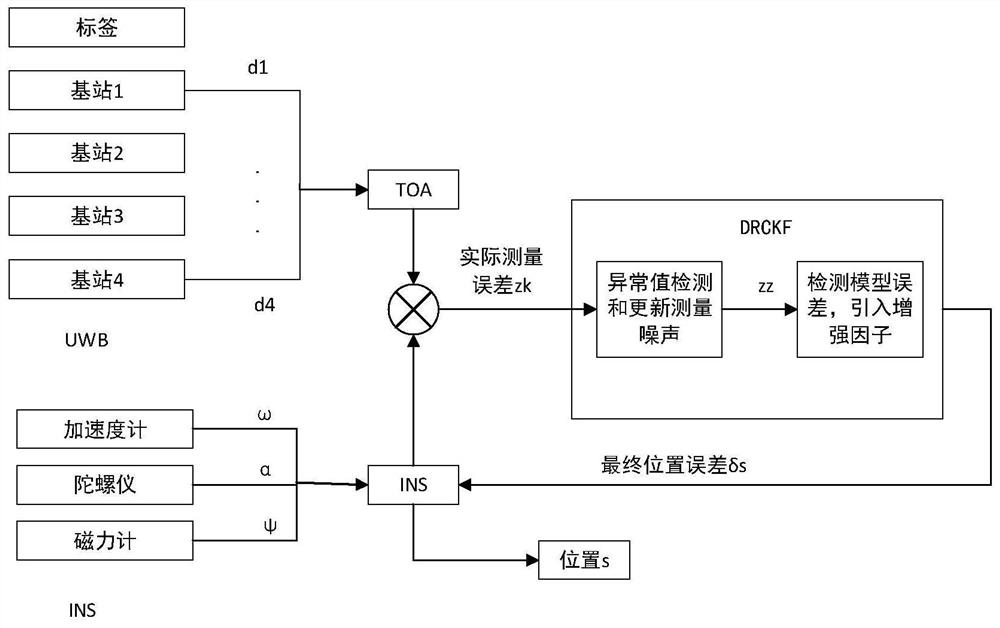
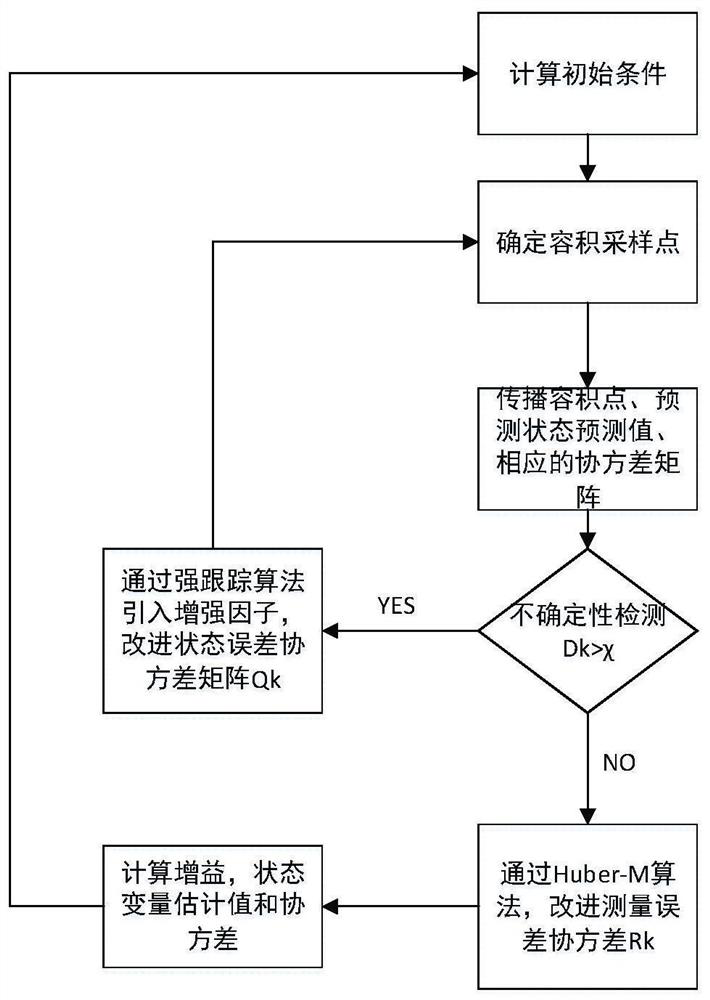
[0035] This embodiment provides a UWB / INS fusion positioning method based on dynamic robust volume, in the NLOS / LOS environment, by dynamic volume Kalman filtering algorithm, filter out the effect of external noise on system estimation, while integrating Strong tracking algorithm to overcome model errors to achieve accurate robust trajectory estimation. Such as figure 1 As shown in a preferred embodiment, the method includes the following steps:
[0036] S1, establish a motion model for UWB-INS fusion positioning. The s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More