

Three-dimensional scene semantic analysis method based on HoloLens space mapping
A technology for 3D scene and semantic analysis, applied in the field of computer vision, can solve problems such as inability to analyze 3D scene semantics, and achieve the effect of improving spatial mapping capabilities
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
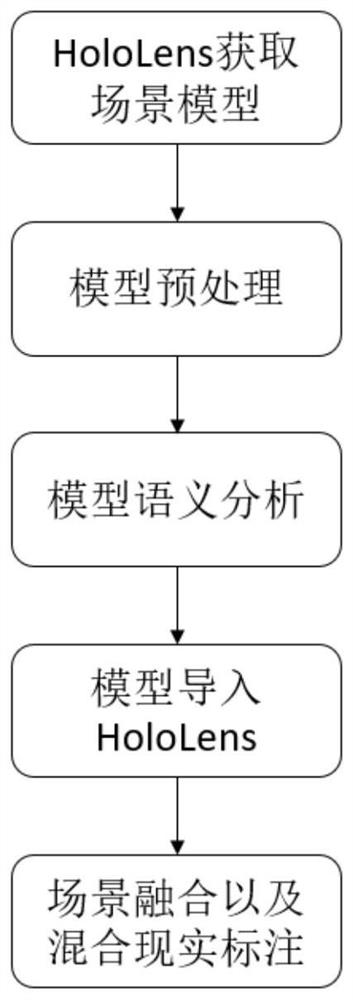
[0057] The present invention is based on the three-dimensional scene semantic analysis method of HoloLens space mapping, such as figure 1 As shown, the specific steps are as follows:
[0058] Step 1: scan and reconstruct the indoor real scene through HoloLens, and obtain the grid data a of the three-dimensional space mapping of the scene;
[0059] Step 2: Convert grid data a to point cloud data b, and complete the preprocessing and data labeling of point cloud data b;
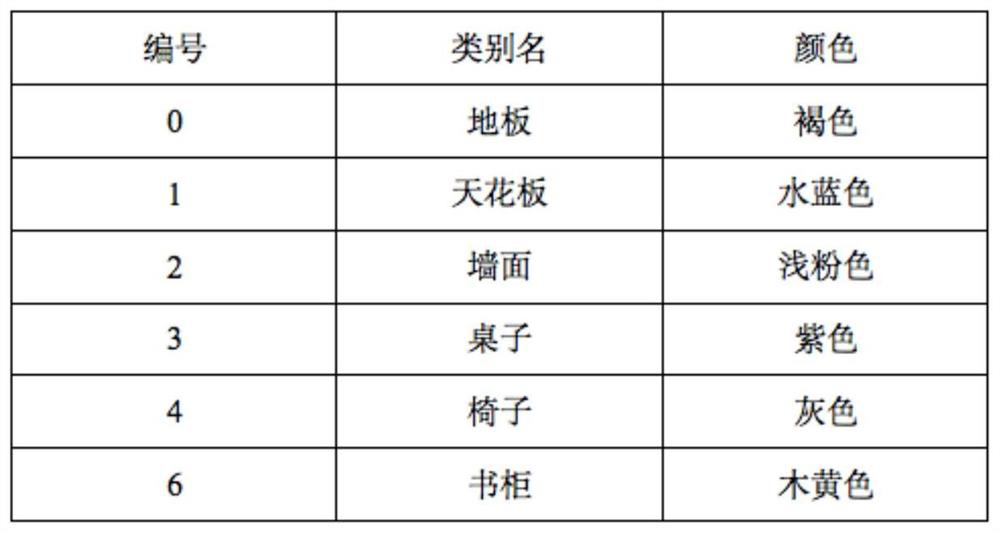
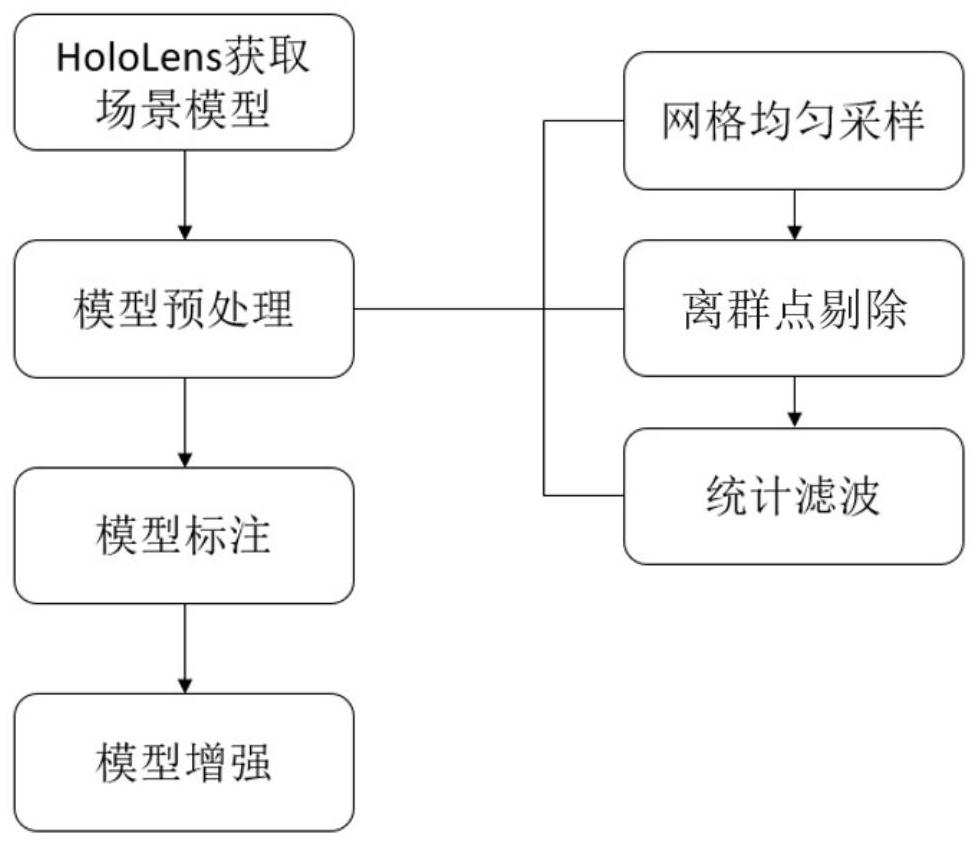
[0060]Step 3: Repeat step 1 and step 2 continuously until the collection and labeling of the required indoor data is completed, and an indoor point cloud dataset and a category information lookup table are made. The category information lookup table is as follows: figure 2 As shown, the data set production process is as follows image 3 shown;
[0061] Step 4: Carry out model training on the 3D scene semantic neural network, and save the training model M;
[0062] Step 5: Create the HoloLens scene semantic...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More