

Error parameter identification co-localization method based on factor graph
A technology of error parameters and collaborative positioning, applied in positioning, measuring devices, instruments, etc., can solve the problem of self-positioning error increase
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0133] The present invention will be described in detail below in conjunction with specific implementation examples.
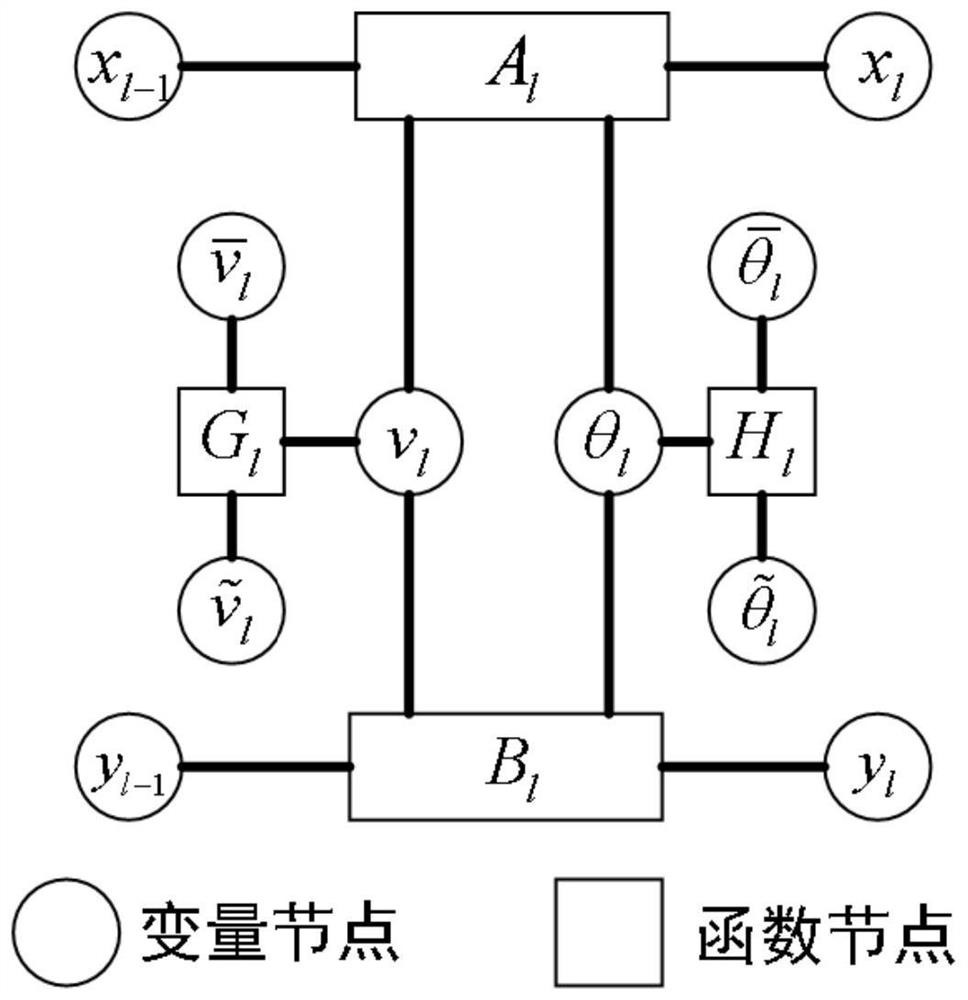
[0134] The present invention proposes a method for identifying and co-locating error parameters based on a factor graph. The method uses the maximum correlation entropy criterion to transmit information between function nodes and variable nodes in the factor graph, and identifies the co-location system from The process error of the boat includes speed error and heading error, and the growth of positioning error is suppressed by compensating the process error, and the autonomous positioning ability of the slave boat is improved. The object of the present invention is achieved through the following steps:
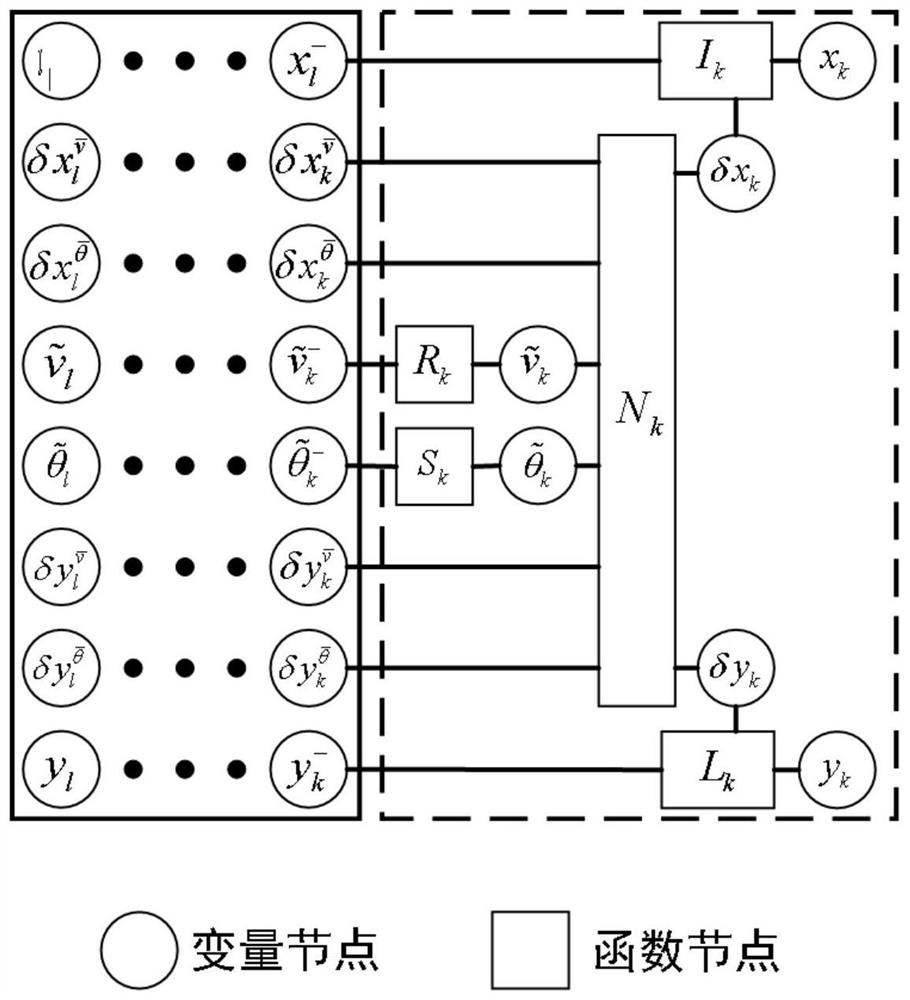
[0135] 1. Establish a factor graph model of error parameter identification and collaborative positioning method;
[0136] 2. Use the maximum correlation entropy criterion to identify the speed error and heading error of the system;
[0137] 3. Compensate th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More