

Apriltag visual localization processing method and system thereof, wall-climbing robot and storage medium
A wall-climbing robot and visual positioning technology, which is applied in the directions of instruments, image enhancement, image analysis, etc., can solve the problems of low positioning accuracy and incapable of real-time self-positioning, and achieve the effect of flexible and autonomous movement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] In order to make the objectives, technical solutions and advantages of the present invention clearer, the present invention will be described in further detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention and are not intended to limit the invention.
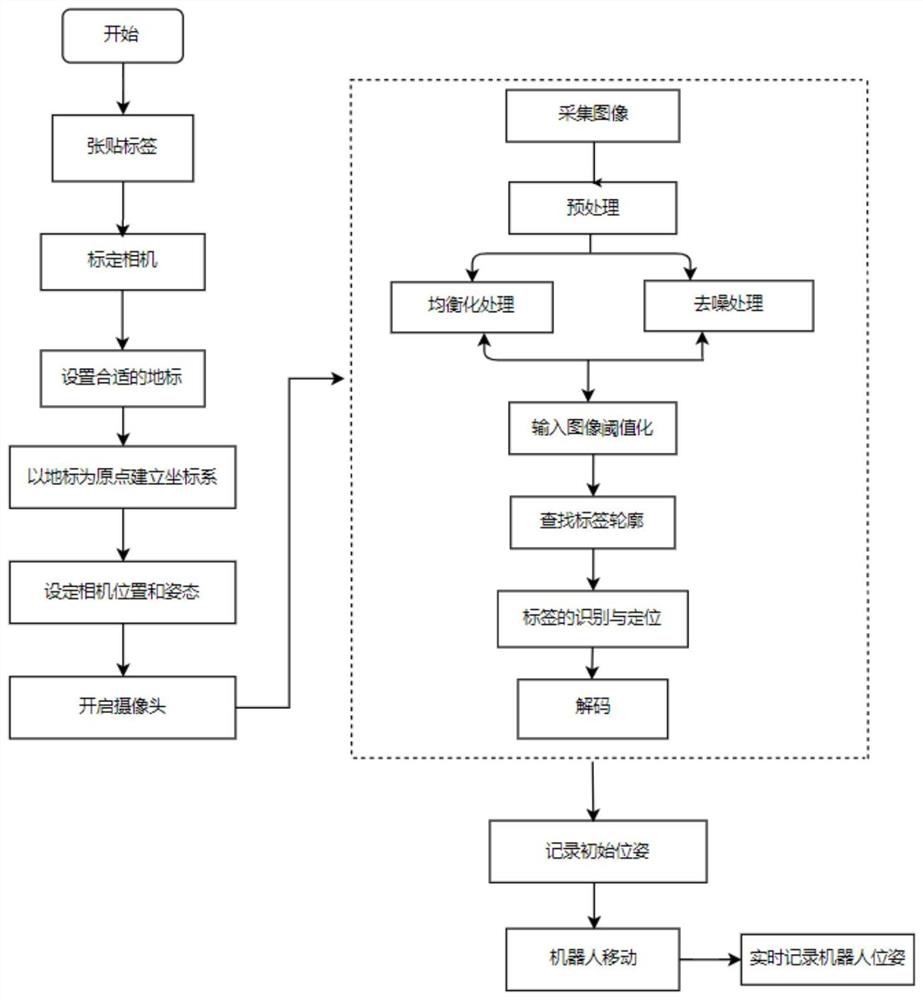
[0036] In this embodiment, the vision-assisted positioning wall-climbing robot processing method based on the Apriltag code uses a basler industrial camera mounted on a specific robot to complete the collection, identification, positioning and processing of the artificial label images that have been arranged in advance in the field of view. Processed parts.
[0037] combine figure 1 , a kind of surface mobile adsorption processing robot positioning processing method based on Apriltag code visual aid positioning of the present invention, comprises the following steps:
[0038] 1) Firs...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More