

Soft robot anti-torsion framework and soft robot
A robot and software technology, applied in the field of robotics, can solve problems such as the inability to overcome the torsion of soft robots along the axis
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
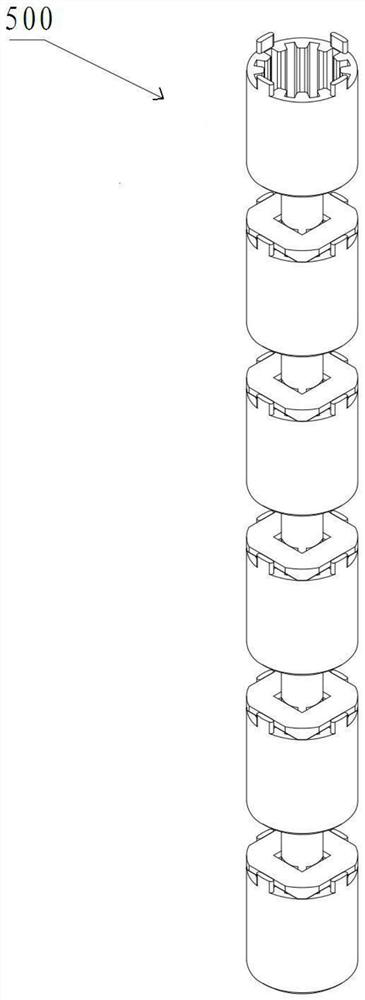
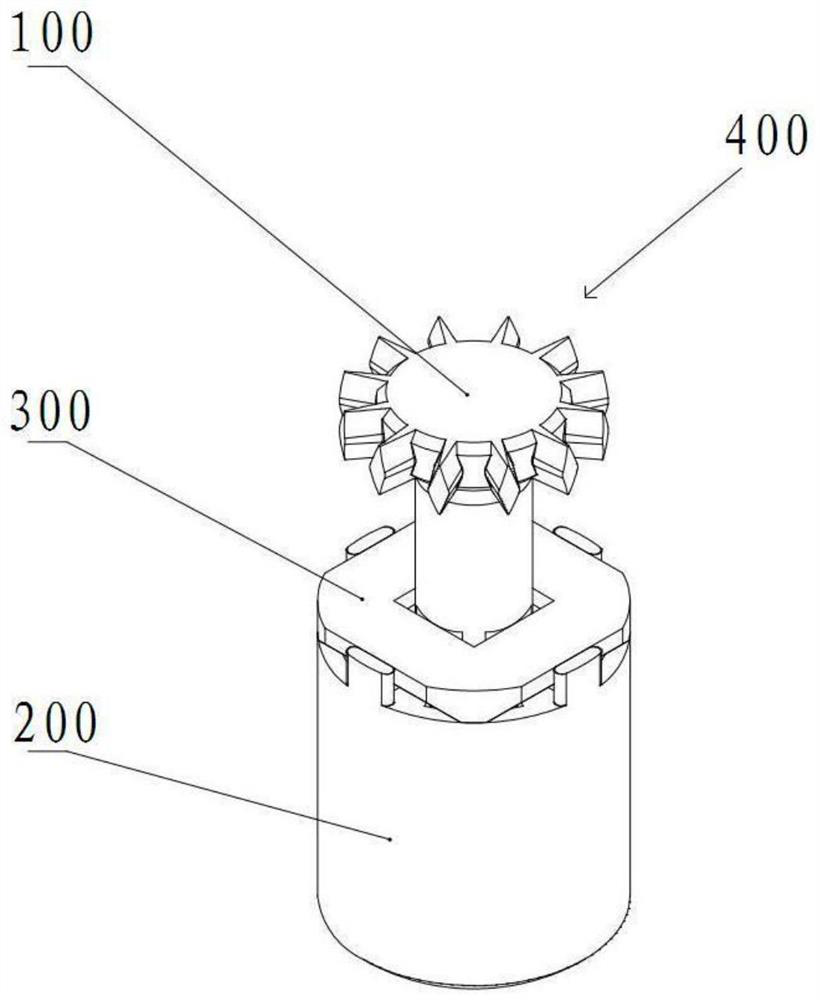
[0040] Such as Figure 1-3 As shown, in the torsion-resistant skeleton of the soft robot in this embodiment, the torsion-resistant skeleton 500 is formed by connecting six torsion-resistant modules 400; The external gear cylinder 200 is detachably connected, and the sprocket 110 of the internal gear shaft 100 meshes with the external gear cylinder 200 of the adjacent torsion-resistant module 400 .
[0041] During specific movement, the external gear cylinder 200 slides up and down along the axis of the internal gear shaft 100 to realize the telescopic movement of the torsion-resistant skeleton 500 .
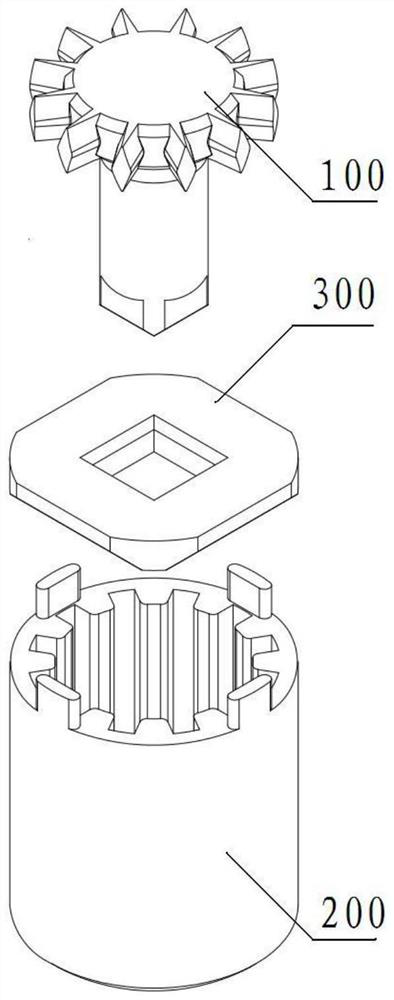
[0042] Such as Figure 2-4 As shown, the internal gear shaft 100 is composed of a toothed disc 110 and a connecting shaft 120. The toothed disc 110 is provided with a plurality of convex teeth 111; the connecting shaft 120 is provided with a se...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More