

Angle detection device and electric power steering device using same
An electric power steering and angle detection technology, applied in electric steering mechanism, power steering mechanism, measuring device and other directions, can solve the problems of angle detection value motor rotation angle error and motor control performance deterioration, and achieve the effect of suppressing angle error
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach 1
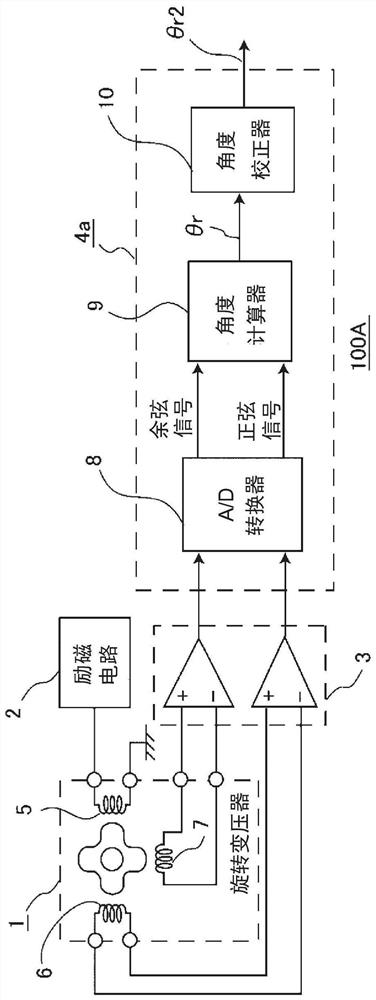
[0038] figure 1 It is a block diagram showing the configuration of the angle detection device according to the first embodiment. figure 1 Among them, the angle detection device 100A includes a resolver 1, an excitation circuit 2, a differential amplifier 3, and an angle calculation unit 4a. The resolver 1 includes an exciting coil 5 , a sine detection coil 6 for detecting the sine of the angle of a motor (not shown), and a cosine detection coil 7 for detecting the cosine of the angle of the motor.
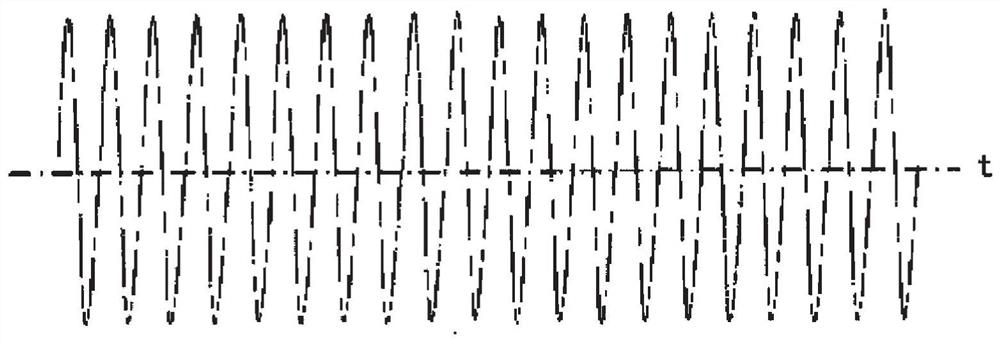
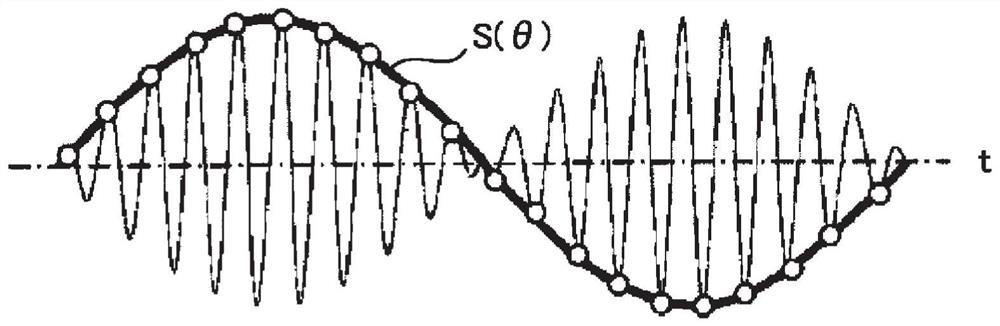
[0039] Resolver 1 via Figure 2A The AC signal shown is used to drive the excitation coil 5, so that the output terminal of the sinusoidal detection coil 6 is output by Figure 2B The sinusoidal signal S(θ) obtained by amplitude modulation of the sine of the angle of the motor shown. In addition, output to the output terminal of the cosine detection coil 7 by Figure 2C Cosine signal C(θ) obtained after amplitude modulation of the cosine of the motor angle shown. here, Figur...
Embodiment approach 2
[0089] Next, an angle detection device according to Embodiment 2 will be described.
[0090] The angle detection device according to the second embodiment differs from the first embodiment only in the offset correction value calculator, and the other parts are the same as those of the first embodiment. Therefore, here, the offset correction value calculator will be described.
[0091] Figure 10 It is a figure explaining the whole structure of the offset correction value calculator of the angle detection apparatus concerning Embodiment 2. The offset correction value calculator 201 according to Embodiment 2 includes a differentiator 106a, a low-pass filter 106b, a first integrator 106c, and a subtractor 106d. In addition, the offset correction value calculator 201 includes a cosine value calculator 201a, a sine value calculator 201b, a first multiplier 201c, a second multiplier 201d, a second integrator 201e, a third integrator 201f, and a fourth integrator 201g and the fift...
Embodiment approach 3
[0106] Next, an angle detection device according to Embodiment 3 will be described.
[0107] In the angle detection device according to Embodiment 3, only the offset correction value calculator described in Embodiment 2 is different, and other parts are the same as Embodiment 1 or Embodiment 2. Therefore, here, the offset correction value calculator will be described.
[0108] Figure 11 It is a figure explaining the whole structure of the offset correction value calculator of the angle detection apparatus concerning Embodiment 3. In the offset correction value calculator 301 according to the third embodiment, the third switch 301a and the third delayer 301b are provided in the subsequent stage of the fourth integrator 201g in the second embodiment, and the fifth integrator 201h The latter stage is provided with a fourth switch 301c and a fourth delayer 301d, when the second speed signal ω 0 When the fixed reference speed ω is equal to or higher, the first offset correction...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More