

Calibration method for unmanned vehicle
A calibration method and technology for pedestrians, which are applied to measuring devices, instruments, etc., can solve problems such as amplification of positioning errors, difficulty in accurate positioning, and deviation of driving wheels, and achieve the goal of eliminating accumulated errors, accurate running positions, and prolonging service life. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0026] The calibration method of the unmanned vehicle in the embodiment of the present invention, the calibration method of the unmanned vehicle is:
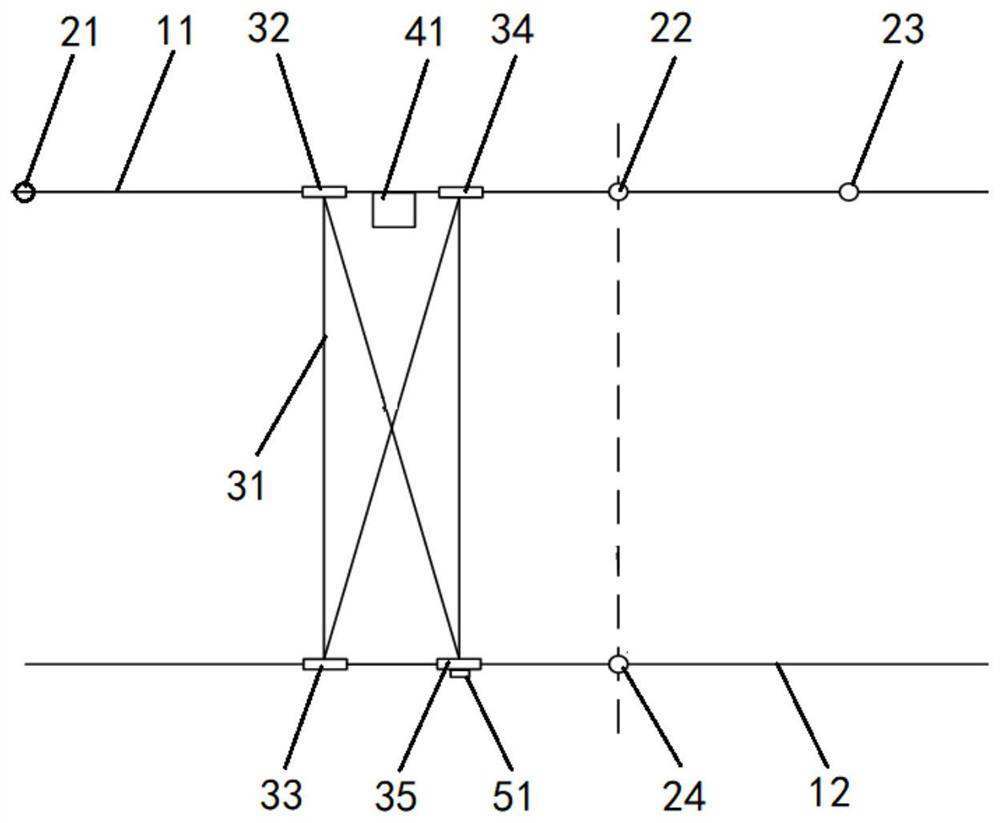
[0027] Such as figure 1 As shown, the two sides of the unmanned vehicle 31 are respectively translated on the first track 11 and the second track 12 to obtain the distance L from the unmanned vehicle to the reference point 21;
[0028] When the unmanned vehicle 31 moves to the first marking point 22, the distance L from the unmanned vehicle 31 to the reference point 21 is obtained at this time 1 ;
[0029] Compare (L 1 -Ls 1 ) and △1, Ls 1 is the distance from the first marking point 22 to the reference point 21, and Δ1 is the allowable maximum position calibration error of the unmanned vehicle 31;
[0030] If (L 1 -Ls 1 )≤△1, no need to calibrate;
[0031] If (L 1 -Ls 1 )>△1, the calibration distance Ls from the unmanned vehicle 31 to the reference point 21=L-(L 1 -Ls 1 );
[0032] When the unmanned vehicle 31 move...
Embodiment 2
[0049] An application example of the calibration method for unmanned vehicles according to Embodiment 1 of the present invention.
[0050] In this application example, if figure 1 As shown, the unmanned vehicle 31 adopts four wheels, and the left rear wheel 32 and the right rear wheel 22 are synchronously driven by the power mechanism. Synchronized with the left front wheel), driven by the power module 51 as required, so as to advance or retreat independently, and then realize the deviation correction function; the left front wheel 34 and the left rear wheel 32 are arranged on the first track 11, the right front wheel 35 and the right Rear wheel 33 is arranged on the second track 12; First track 11 and second track 12 are arranged in parallel; Distance measuring device 41 adopts laser range finder, is arranged on the left side of described unmanned vehicle 31, and on the first track A light reflection component is set at the reference point 21 of 11;
[0051] The reference p...
Embodiment 3
[0071] According to the application example of the calibration method for unmanned vehicles in Embodiment 1 of the present invention, the difference from Embodiment 2 is:
[0072] The power module drives the left front wheel independently according to the needs; when it is necessary to correct the deviation, the right rear wheel of the unmanned vehicle is locked, the left rear wheel is free, and the power module is used to drive the left front wheel back, and the back distance is v△t.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More