

Optimal path planning method for grabbing product by manipulator and readable storage medium
An optimal path planning and optimal path technology, applied in the field of manipulators, can solve the problems of low grasping efficiency, difficulty in obtaining the optimal path, unreasonable path planning, etc., and achieve the effect of improving grasping efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0021] The present invention will be further described below in conjunction with the description of the drawings and specific embodiments.
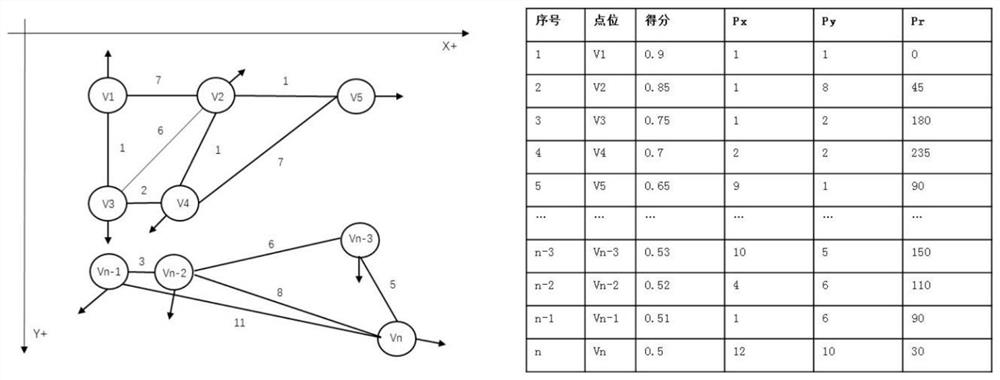
[0022] An optimal path planning method for manipulators to grab products, such as figure 1 As shown, using machine vision, the pixel coordinates are obtained through image processing, converted to the coordinate system of the industrial manipulator, and the position information and angles of the 5 products V1->V2->V3->V4>V5 are calculated, which affects the manipulator to take the entire product. 2 factors of cycle time, path D and angle change;
[0023] Example: According to the above planning path V1->V2->V3->V4
[0024] Path D=7+6+2=22
[0025] Angle change R=45+135+55=235.
[0026] The specific planning process is as follows:
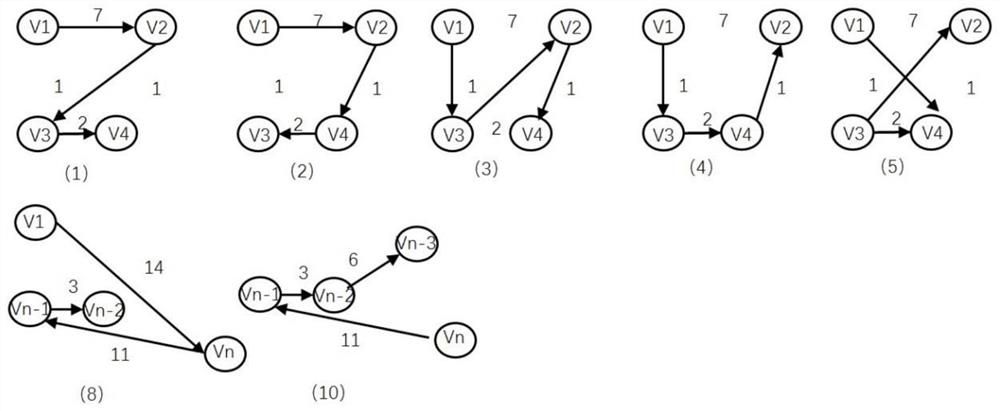
[0027] 1. Select V1-Vn as the starting point in turn, and randomly select 3 of the remaining n-1 points, and the obtained combination is stored in the dis array, such as figure 2 shown;
[0028] ①dis[0][...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More