

A Lane Recognition Method Based on Vehicle-Road Coordination
A technology of lane recognition and vehicle-road collaboration, applied in the field of lane recognition based on vehicle-road collaboration, can solve the problems of inability to recognize lanes, recognition, and inability to recognize lane lines, and achieve the effect of easy engineering practice, improved accuracy and robustness
Active Publication Date: 2022-06-03
BEIJING INSTITUTE OF TECHNOLOGYGY
View PDF0 Cites 0 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
However, in the above system, it is more effective to perform lane recognition when the lane boundary line can be accurately recognized. However, there is a problem that lane recognition cannot be performed when the lane line cannot be recognized due to weather conditions or lane line wear.
[0004] When the lane line cannot be recognized, the laser radar and the surrounding environment device can be used to detect the surrounding environment of the vehicle to determine the lane in which the vehicle is located. However, when the road environment changes and does not match the pre-stored road structures inside the vehicle, the There is a situation where it is not possible to detect the lane in which the vehicle is located
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
Embodiment Construction
[0040] y(t)=Δ(t)*h(t)
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
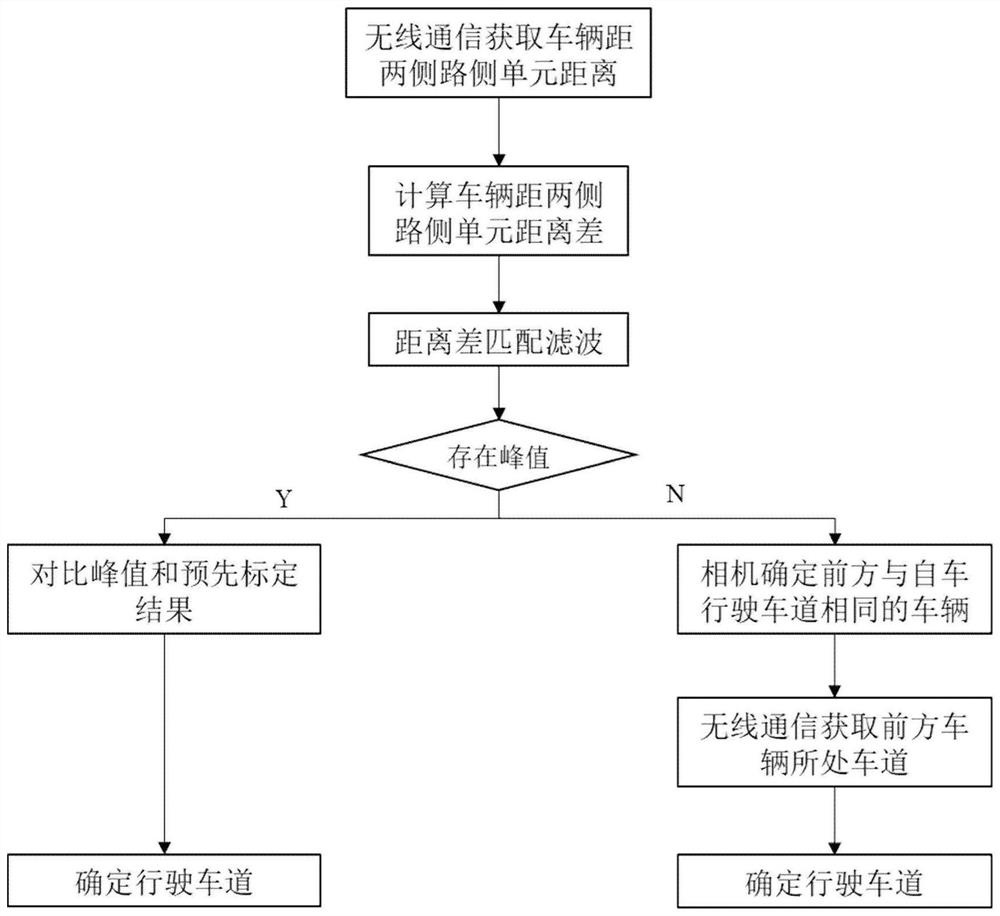
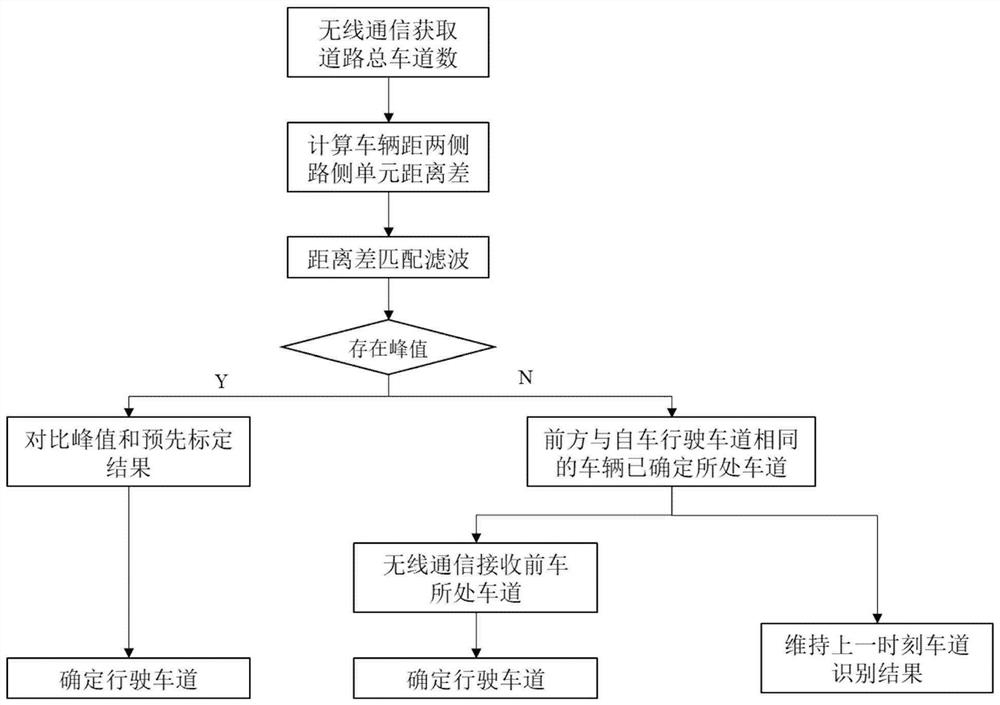
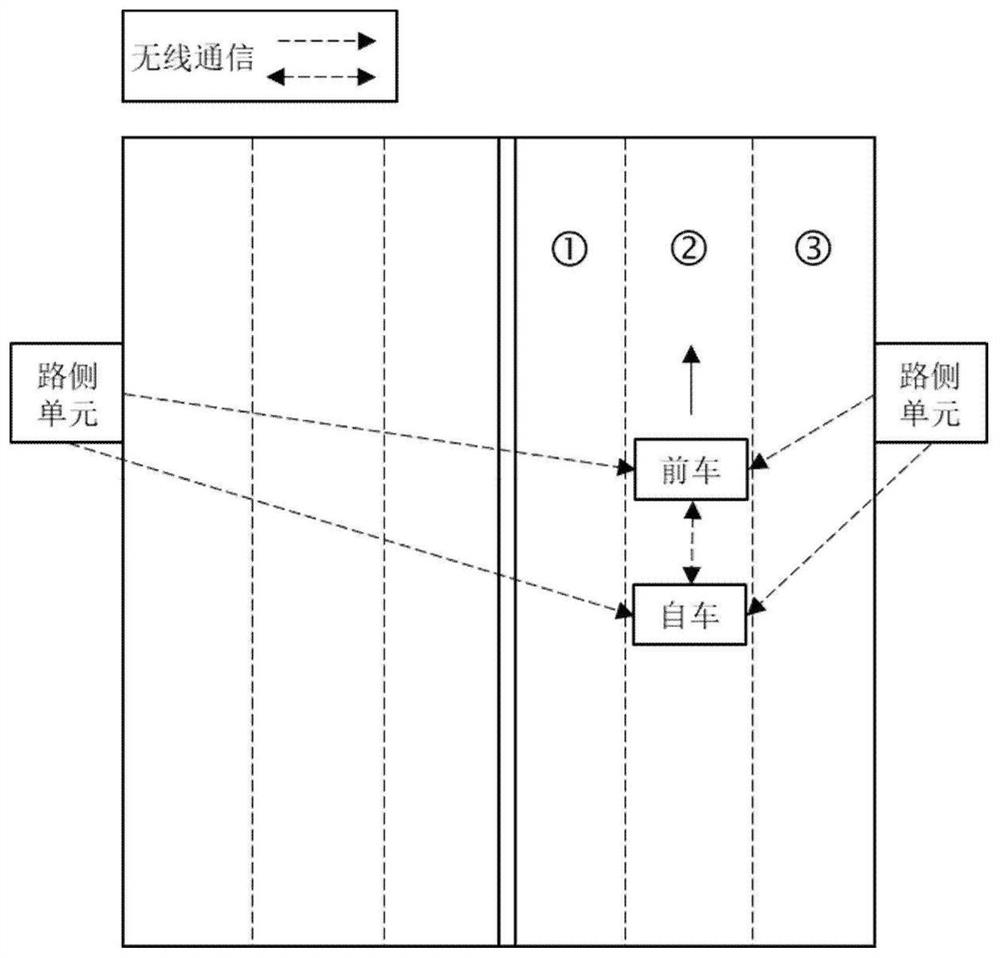
The invention discloses a lane recognition method based on vehicle-road coordination, which collects the distance between the vehicle and the roadside units on both sides of the road in real time, and performs matching filtering on the distance difference between the vehicle and the roadside units on both sides of the road to obtain the peak value of the distance difference , and determine the driving lane of the vehicle according to the pre-calibration data; when the peak value after the distance difference filtering cannot be obtained, the camera is used to judge whether there is a vehicle in the same lane as the own vehicle in front of the vehicle, and the wireless communication between the own vehicle and other vehicles Obtain the lane of the vehicle in front as the lane recognition result. The method proposed by the invention has high accuracy in identifying lanes, good real-time performance, and is easy to realize engineering practice.
Description
A Lane Recognition Method Based on Vehicle-Road Collaboration technical field The present invention relates to the field of intelligent traffic intelligent vehicles, in particular to a lane recognition method based on vehicle-road collaboration. Law. Background technique [0002] With the rapid development of 5G communication and vehicle networking technologies, autonomous driving technology has become a research hotspot. Autopilot The core technologies in the field include intelligent environment perception, automatic navigation and positioning, driving behavior decision-making and intelligent path planning control. In the process of autonomous driving, it is necessary to judge the lane in which the vehicle is driving, so as to make decisions and intelligently for the subsequent driving behavior. Path planning control improves the foundation. [0003] Conventionally, in order to determine the lane in which the own vehicle is traveling, a technique has been disclosed ...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More Patent Type & AuthorityPatents(China)
IPC IPC(8): G08G1/01G08G1/056
CPCG08G1/01G08G1/056G08G1/0116
Inventor蒋朝阳王星琦
OwnerBEIJING INSTITUTE OF TECHNOLOGYGY