

Contour-scanning laser-guided unmanned vehicle for intelligent logistics and its application method
A technology of laser navigation and unmanned trolley, which is applied to conveyor objects, packaging, mechanical conveyors, etc., can solve problems such as collision, unmanned trolley does not have self-contour perception function, and cargo damage, and achieves safe and reliable transportation. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments, and the implementation scope of the present invention is not limited thereto.
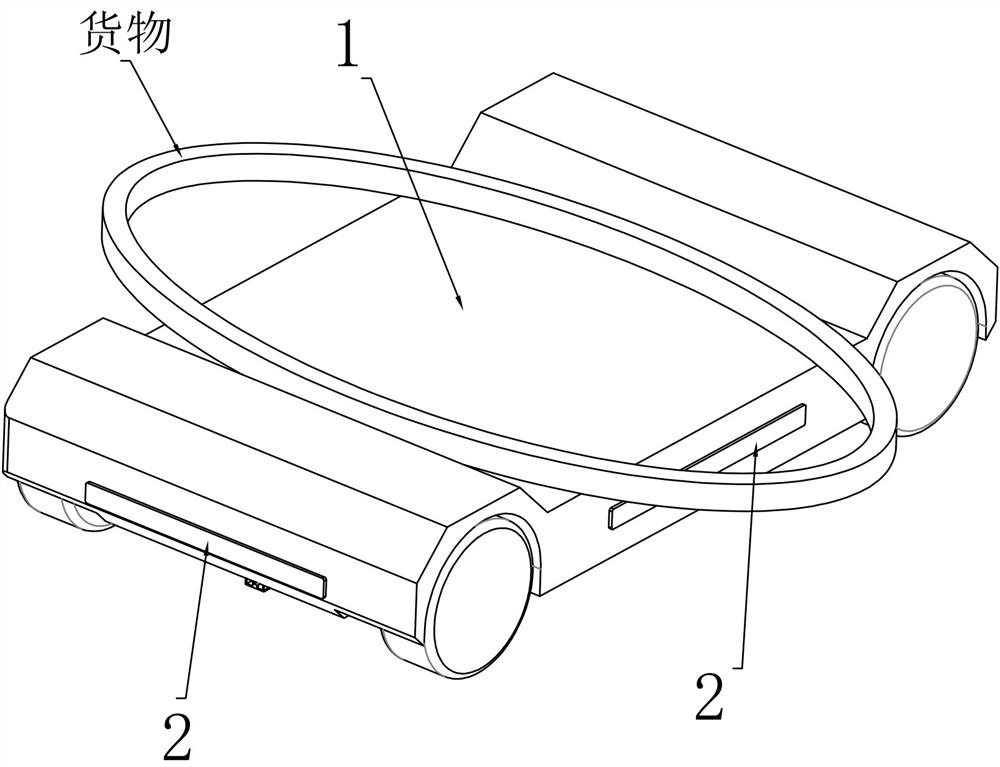
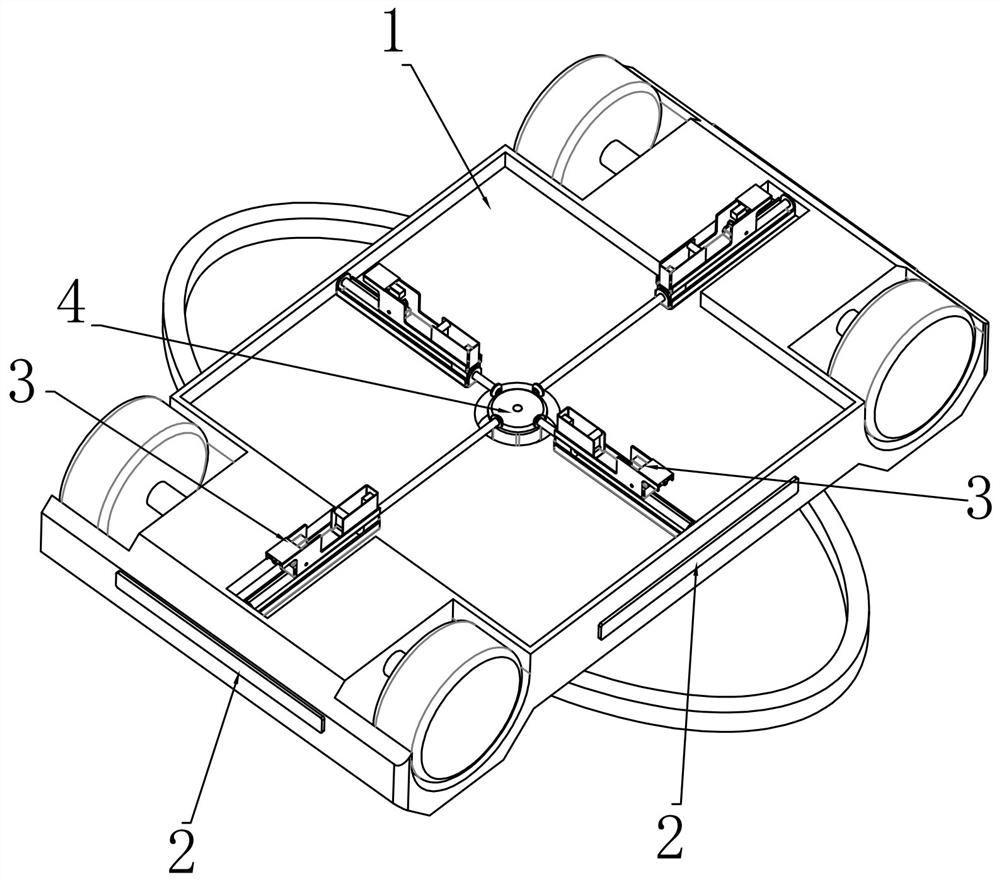
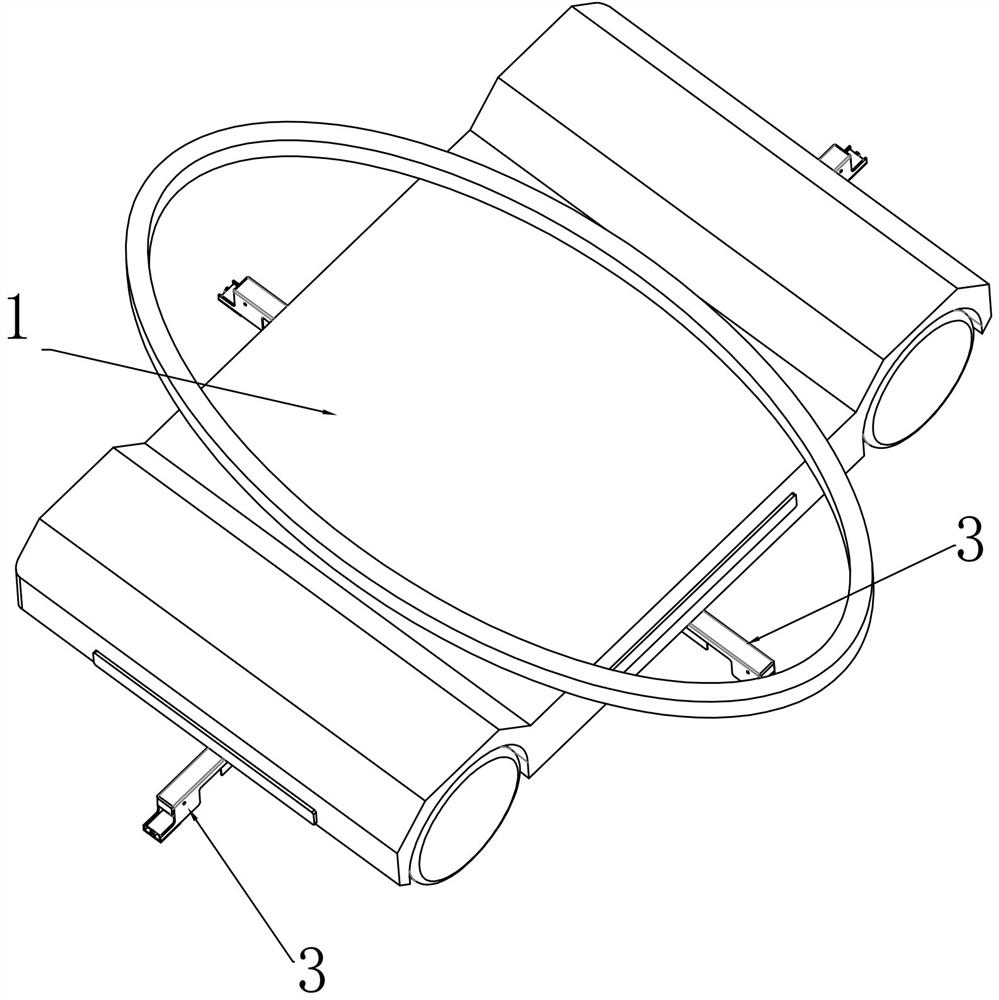
[0021] Such as Figure 1 to Figure 6 As shown, a contour-scanning laser navigation unmanned car for intelligent logistics described in this embodiment includes a car body 1, and a laser navigation radar 2 is provided in the front, rear, left, and right directions of the car body 1; The bottom of the car body 1 is provided with four contour scanning units 3 corresponding to the four directions of the front, rear, left, and right sides of the car body 1; Sensing; the bottom of the car body 1 is also provided with a protruding power mechanism 4, and the protruding power mechanism 4 is used to synchronously drive four contour scanning units 3 correspondingly extending toward the front, rear, left, and right directions of the car body 1. out. In actual use, the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More