

Underground mining articulated vehicle trajectory planning method based on trust domain
A trajectory planning, trust domain technology, applied in the direction of motor vehicles, two-dimensional position/navigation control, vehicle position/route/altitude control, etc. problem, to achieve the effect of improving computing efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0114] The following will clearly and completely describe the technical solutions in the embodiments of the present invention in conjunction with the accompanying drawings in the present invention. Obviously, the described embodiments are only some of the embodiments of the present invention, not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
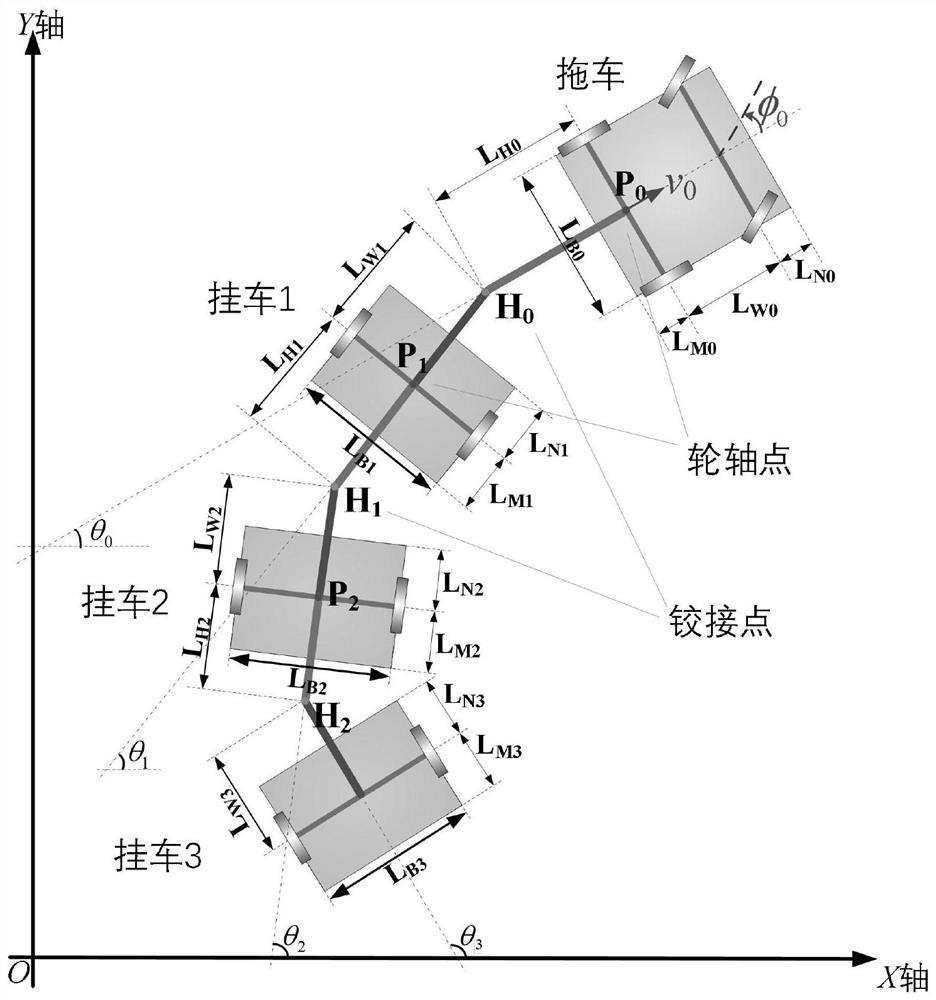
[0115] The trajectory planning method of the underground mine articulated vehicle based on the trust domain includes:
[0116] Step 1. Generate a rough driving track: On the premise of specifying the starting point and end point of driving, an obstacle avoidance track connecting the starting and ending positions is formed. The specific planning method of the driving trajectory is: using the A* algorithm to plan the path PATH of the vehicle head; using the Pontrya...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More