

Pneumatic four-finger manipulator structure
A manipulator and palm technology, applied in the field of pneumatic four-finger manipulator structure, can solve the problems of affecting production efficiency, easy to fall, increase production time, etc., and achieve the effect of improving maximum quality, good flexibility and compact structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
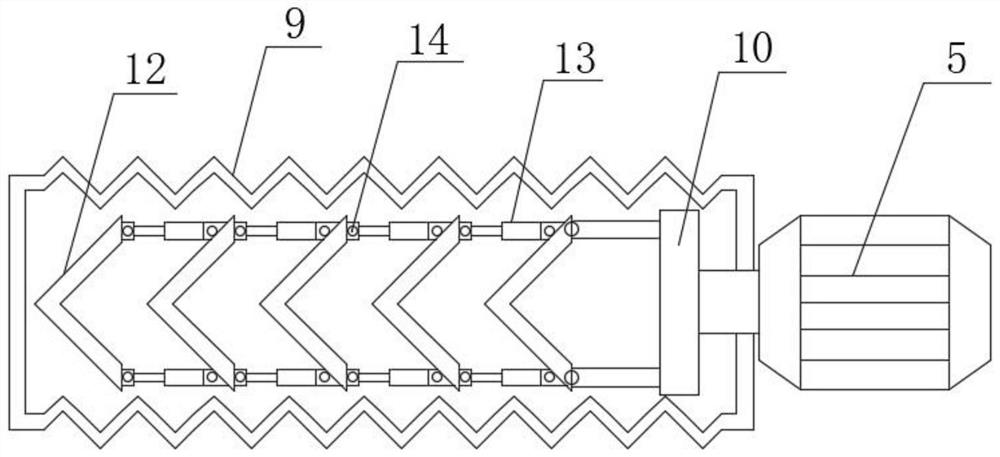
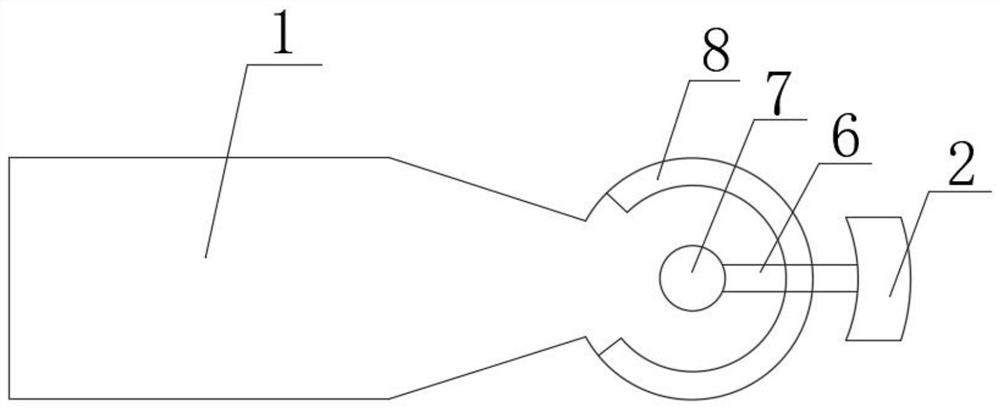
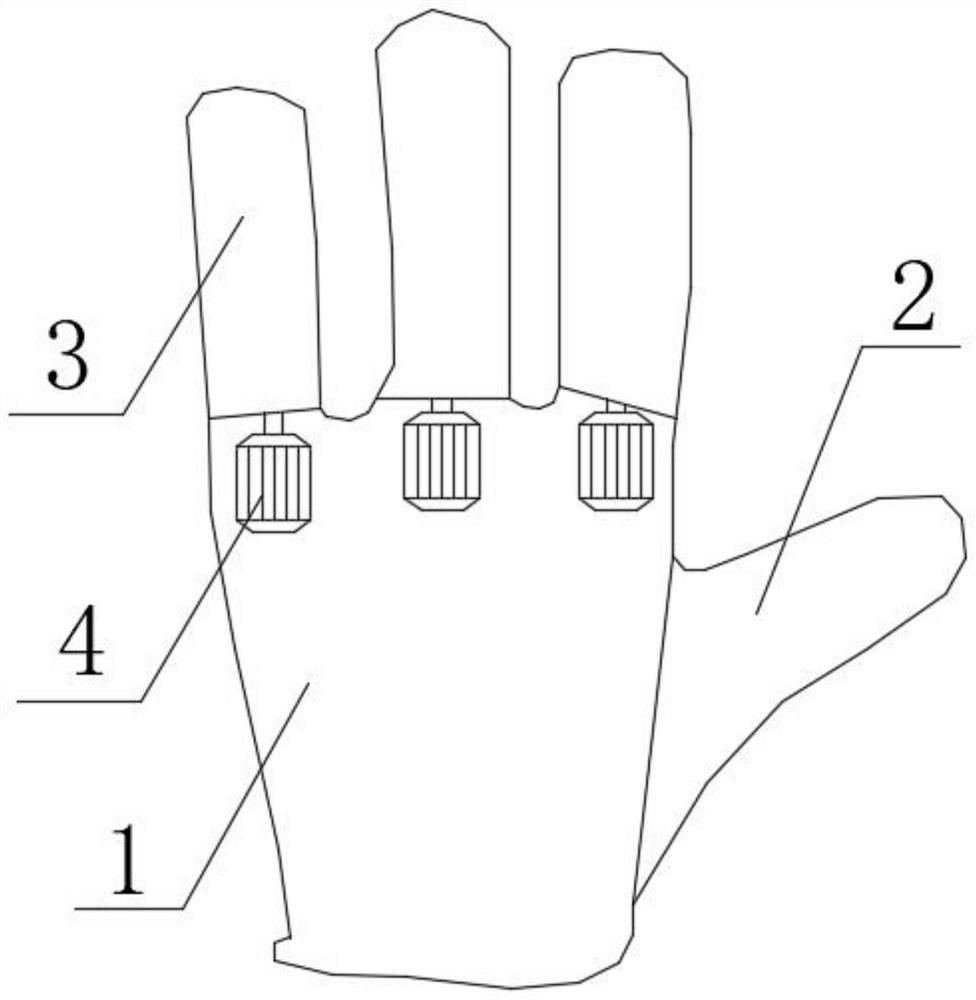
[0025] When grabbing an object, the thumb 2 uses the second motor 5 to adjust its position according to the orientation of the object, and then the PLC controls each air rod 13 to expand and contract to a certain extent, and cooperates with the rotatable pins at both ends of the air rod 13 14 to complete the bending of the three subfingers 3 and the thumb 2 to realize the function of grabbing the object. According to the appearance shape and size of the object, the bending degree and angle of each finger can be automatically controlled; the angle control can use the first The steering of the motor 4 and the third motor 7 is completed, so that the objects on the back and inside can achieve the grasping effect, which is convenient for grasping objects in some narrow spaces, and the skeleton 12 of the triangular structure is performing multiple fine angles. During the adjustment, it is possible to well avoid the conflict between the various skeletons 12, and at the same time ensur...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More