Hierarchical path tracking control implementation method for wheeled mobile robot
A mobile robot and path tracking technology, applied in the direction of non-electric variable control, vehicle position/route/height control, control/adjustment system, etc., can solve the problem that the average driving speed of wheeled mobile robots cannot be further improved, and achieve an increase in average The effect of driving speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
no. 1 example
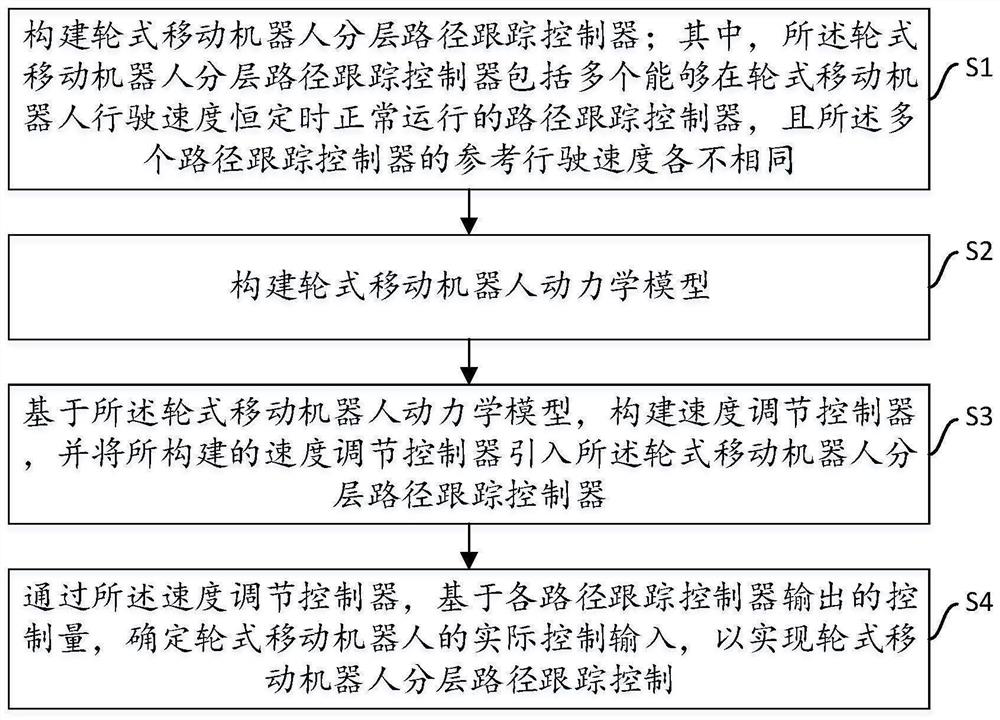
[0084] Aiming at the problem that the existing technical solutions can only realize stepwise speed regulation, and the average driving speed of the wheeled mobile robot cannot be further improved when there are curves with different radii in the reference path, this embodiment provides a wheeled mobile robot that divides The implementation method of layer path tracking control is suitable for high-speed wheeled mobile robots. This method can be realized by electronic equipment. The execution process of this method is as follows: figure 1 shown, including the following steps:
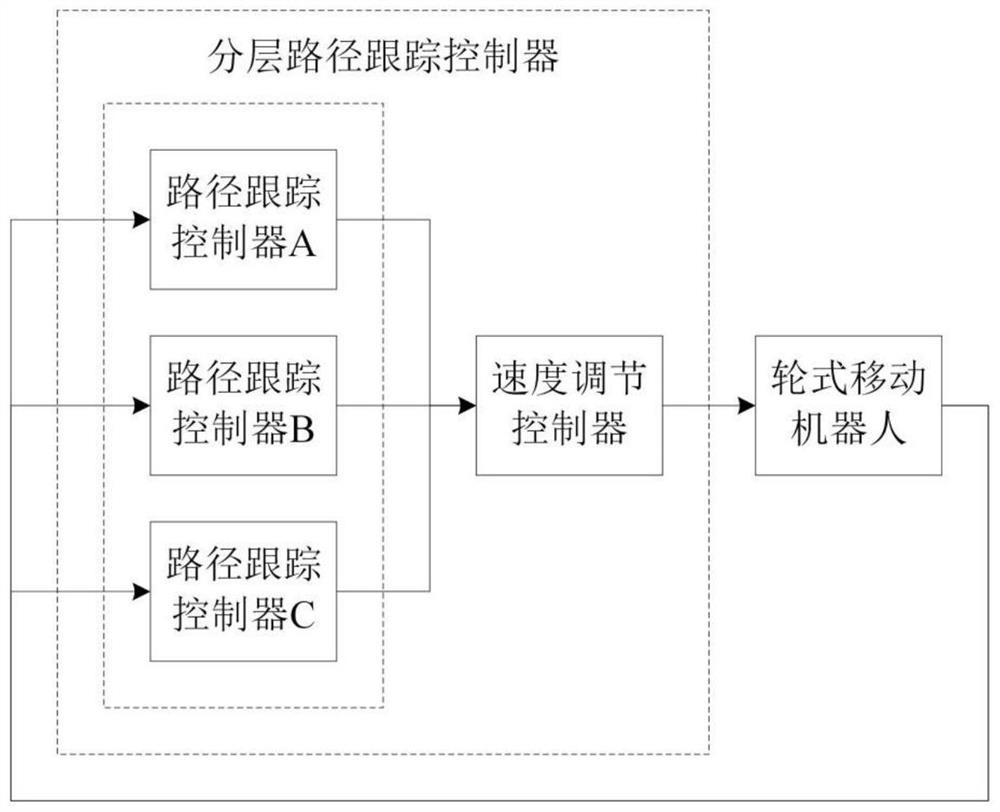
[0085] S1, constructing a layered path-tracking controller for the wheeled mobile robot; wherein, the layered path-tracking controller for the wheeled mobile robot includes a plurality of path-tracking controllers that can operate normally when the wheeled mobile robot travels at a constant speed, and The reference travel speeds of the plurality of path-following controllers are different;
[0086] S2, ...
no. 2 example
[0153] This embodiment provides an electronic device, which includes a processor and a memory; at least one instruction is stored in the memory, and the instruction is loaded and executed by the processor, so as to implement the method of the first embodiment.
[0154] The electronic device may have relatively large differences due to different configurations or performances, and may include one or more processors (central processing units, CPU) and one or more memories, wherein at least one instruction is stored in the memory, so The above instruction is loaded by the processor and executes the above method.
no. 3 example
[0156] This embodiment provides a computer-readable storage medium, where at least one instruction is stored, and the instruction is loaded and executed by a processor, so as to implement the method of the first embodiment above. Wherein, the computer-readable storage medium may be ROM, random access memory, CD-ROM, magnetic tape, floppy disk, optical data storage device and the like. The instructions stored therein can be loaded by the processor in the terminal to execute the above method.
[0157] In addition, it should be noted that the present invention may be provided as a method, device or computer program product. Accordingly, embodiments of the invention may take the form of an entirely hardware embodiment, an entirely software embodiment or an embodiment combining software and hardware aspects. Furthermore, embodiments of the invention may take the form of a computer program product embodied on one or more computer-usable storage media having computer-usable program ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com