

Urban green land-oriented mowing robot traversal path planning method
A lawn mowing robot and traversal path technology, applied in the direction of instruments, two-dimensional position/channel control, vehicle position/route/height control, etc., can solve the problems of high repetition rate of traversal, low repetition rate, low work efficiency, etc. Achieve the effects of low repetition rate of traversal, lower difficulty, reduced path length and number of turns
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] Below in conjunction with accompanying drawing and specific embodiment, further illustrate the present invention, should be understood that these embodiments are only for illustrating the present invention and are not intended to limit the scope of the present invention, after having read the present invention, those skilled in the art will understand various aspects of the present invention Modifications in equivalent forms all fall within the scope defined by the appended claims of this application.
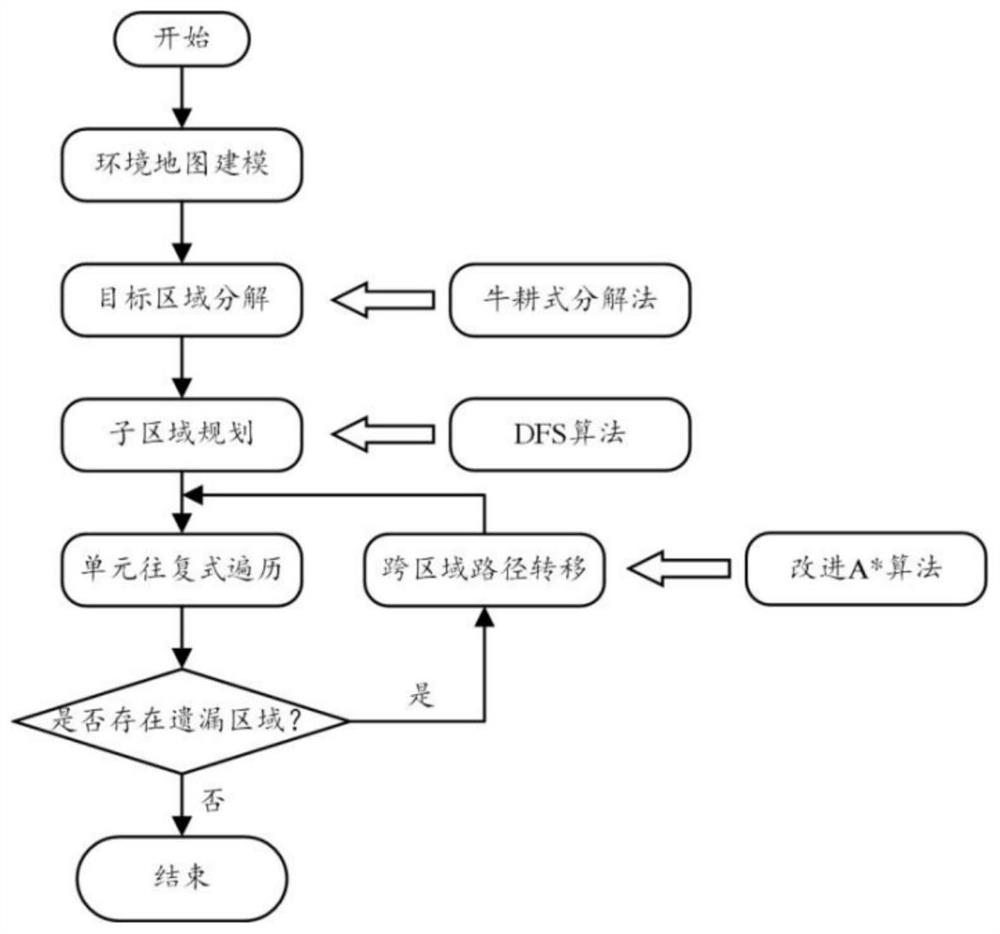
[0059] The present invention provides a traversal path planning method for a mowing robot facing urban green space, such as figure 1 shown, including the following steps:
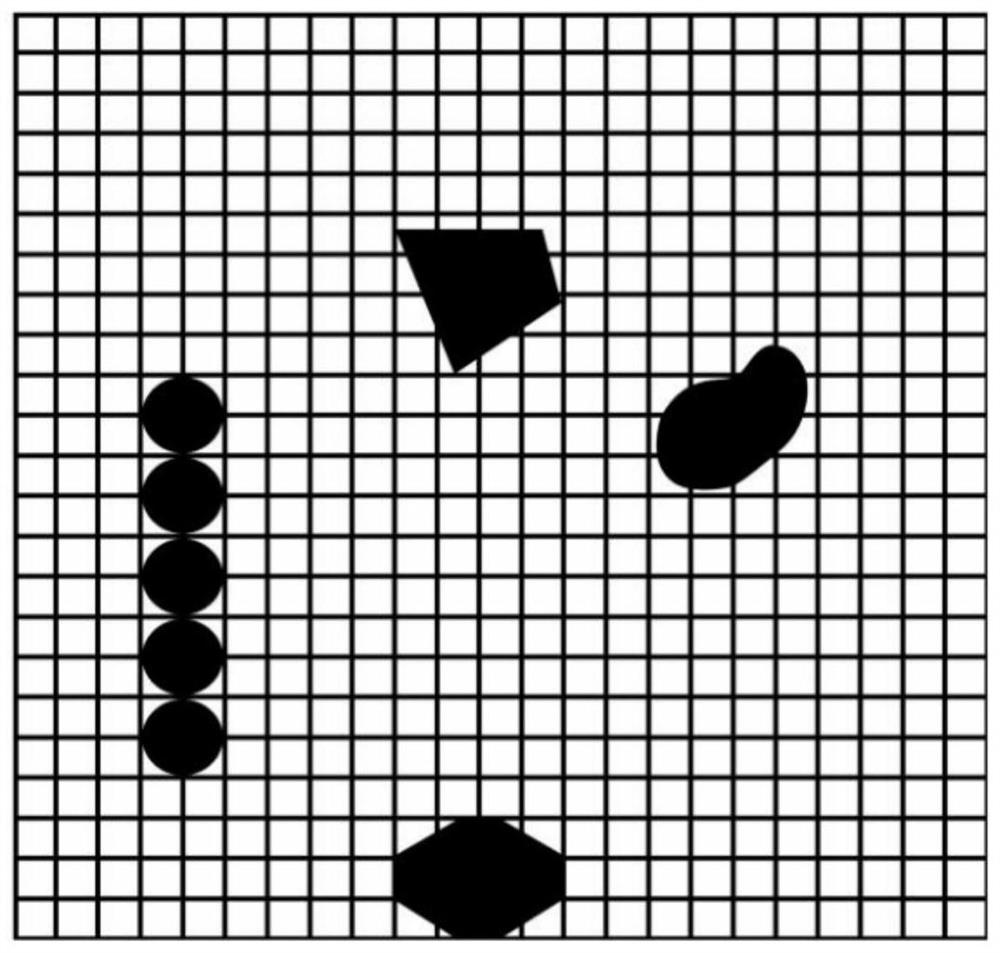
[0060] S1: Obtain the original map of the target area: Obtain the current location information and the environmental map information of the target area through the laser radar carried by the robot, that is, the radar map, and use the radar map as the original map of the target area;
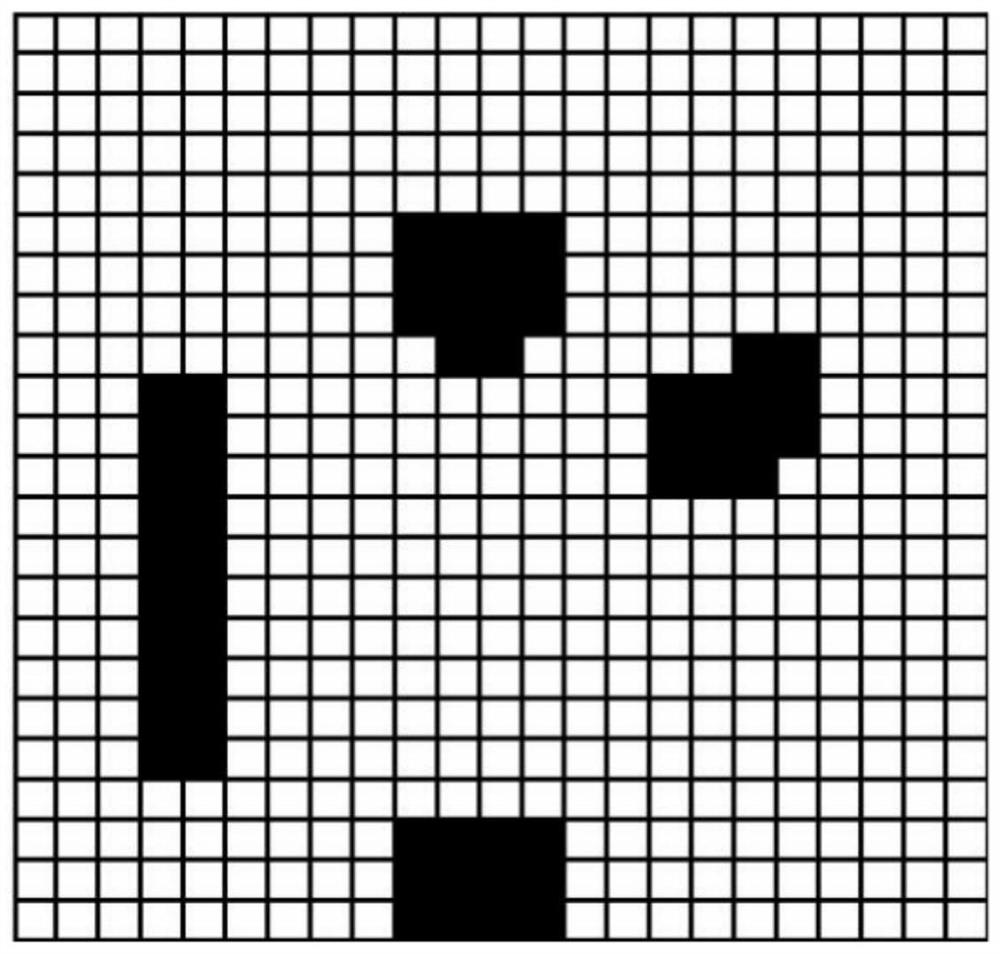
[0061] S2: Divi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More