

Distributed autonomous optimization method for cooperative reconnaissance coverage of unmanned aerial vehicle cluster
An optimization method, UAV technology, applied in non-electric variable control, instruments, control/regulation systems, etc., can solve the problem of insufficient consideration of the reconnaissance success rate, and achieve the goal of maintaining the comprehensive efficiency of reconnaissance, stabilizing the comprehensive efficiency of reconnaissance, and improving stability. Effects of Sex and Flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0064] The present invention will be further described below in conjunction with the accompanying drawings. The following examples are only used to illustrate the technical solution of the present invention more clearly, but not to limit the protection scope of the present invention.
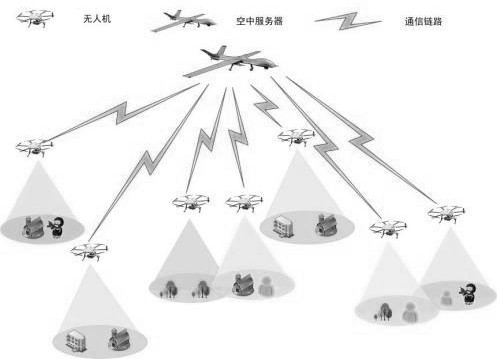
[0065] An embodiment of the present invention provides a distributed autonomous optimization method for UAV cluster cooperative reconnaissance coverage, including the following steps: Step S1. Initialize the position strategy and power strategy of each UAV in the UAV group, based on the The choice of position strategy and power strategy of UAVs is used to construct UAV swarm action decisions.
[0066] There is at least one preset target point to be reconnaissance in the reconnaissance area, based on the action decision of the UAV group, the reconnaissance success rate of each UAV in the UAV group to each preset target point to be reconnaissance, and the accuracy of each UAV in the UAV group. Rec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More